Download PDF
Download page Migration guide from firmware v2 to v3.
Migration guide from firmware v2 to v3
You've heard about the Ellipse Firmware v3.x and are ready to upgrade to experience its new capabilities—you're in the right place.
Upgrading is easy, but there are a few important details to consider to get the most out of this new version. This guide will walk you through the essentials, to check and ensure the compatibility of your setup with the new Firmware.
For complete instructions, use this guide alongside our technical documentation available in the sbgECom library documentation.
Firmware version v3.x is only support on Ellipse Hardware V3 and above. If you own an Ellipse Hardware v2, the existing Firmware version2 will continue to be maintained, but will not benefit from the new features and performance improvements.
Compatible software
This firmware is compatible with the following:
- sbgFirmwareUpdater: version 5.0 or higher (required for firmware updates).
- sbgCenter: version 5.0 or higher.
- sbgECom: version 5.1 or higher.
- Inertial SDK: version 10.0 or higher.
Firmware update procedure
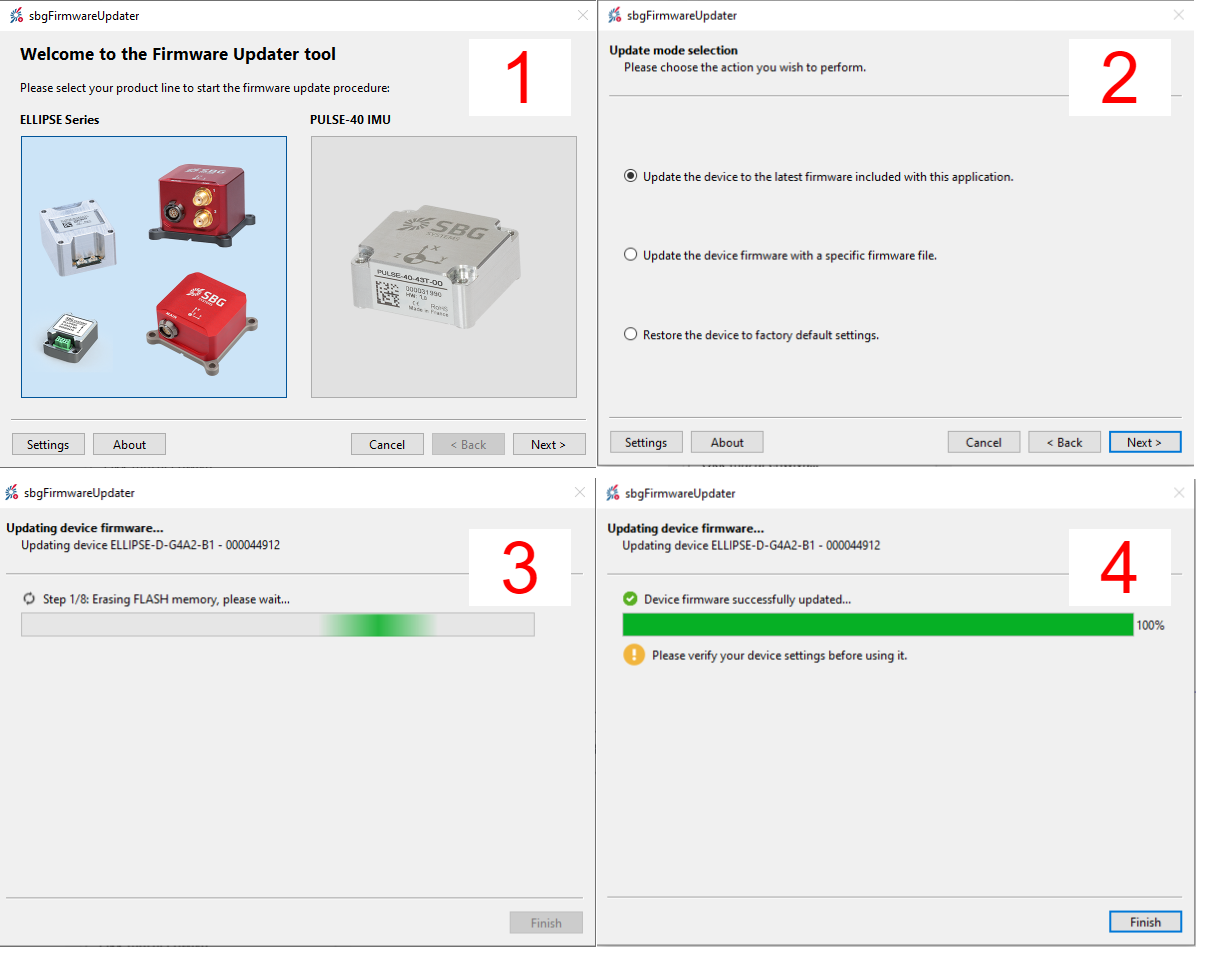
Connect the Ellipse to the computer and launch the sbgFirmwareUpdater tool version 5.0.
You can either:
- Update the device to the latest firmware (v3.0), included with the software, or
- Select a specific firmware file with the .fmz extension.
Settings migration
After the firmware upgrade, your settings won't be lost ; they will be either migrated as is or replaced by an equivalent to maintain the integrity of your integration. The table below summarizes these changes along with the applicable alternatives. Further details on each setting can be found right after the table.
| Setting | Before | After | Comments |
|---|---|---|---|
| Output location | Center of rotation of the vehicle (CoR) - indirectly | Monitoring point configured automatically at the Center of rotation of the vehicle (CoR) | It is now explicit with a parameter to set. During migration, this parameter is set to CoR. |
| IMU short output rate | On New Data | 200Hz | IMU short can now be outputted at a frequency up to 1 kHz. During migration, this setting is set to 200Hz, which is equivalent to the "On New Data" option on the Firmware v2 |
| Magnetic calibration data | Frequency from 1 to 50 Hz | On New Data | |
| Magnetic calibration mode | 2D or 3D | 2D | During migration, since there is no way to know which magnetic calibration was used, all calibrations will be considered as 2D. |
| Magnetometer error model | SBG_ECOM_MAG_MODEL _NOISY_MAG_TOLERANT (Robust) | SBG_ECOM_MAG_MODEL_INTERNAL_NORMAL (Normal) | There is only one magnetometer error model: normal which has the accuracy of the Firmware v2 Normal and the robustness of the Firmware v2 robust combining the best of both worlds. During migration, if you had set the parameter to "robust," it will automatically replaced by "normal". |
| GNSS lever arms installation mode | Rough lever arm SBG_ECOM_GNSS_INSTALLATION _MODE_DUAL_ROUGH | Precise lever arm SBG_ECOM_GNSS_INSTALLATION _MODE_DUAL_PRECISE | Previous "rough lever arm" configuration will be migrated to "precise lever arm". |
| DVL convention | Misalignment angles | Rough orientation and misalignment angles | The DVL alignment setting is updated from left-handed frame to a right-handed one. The alignment parameter will automatically migrate during the firmware update. |
If you downgrade the firmware from version v3.x to a previous version (<3.0), your settings will be lost and reset to their default values.
The output buffer on all output ports except for port A have been decreased by a ratio of 4, so the same outputs with the same baud rate on port A and port E for example can saturate on port E and not on port A.
Output location
Previously, all messages could only be output at:
- the IMU location explicitly if the main lever arm was set to (0,0,0)
- or the center of rotation CoR if the main lever arm was configured with non-zero values
Starting with firmware version v3.0, you can now select a custom output point. Using sbgCenter or the REST API, you can configure the lever arm to define a specific location for data output based on your requirements.
During migration, the default output location will automatically be set to the CoR to align with your previous configuration.
Due to CPU contraints, the output location setting applies to all Ellipse COM ports. For example, it’s not possible to output data at the IMU location on port-A and at a custom point on port-E.
IMU data output rate
Two messages are available within the Ellipse firmware to output IMU data:
- SBG_ECOM_LOG_IMU_DATA, or "Inertial data" (deprecated): with an output rate from 1Hz to 200Hz. No change on this message
- SBG_ECOM_LOG_IMU_SHORT, or "IMU Short": previously, this message had a fixed output rate of 200 Hz, corresponding to "On New Data" setting. Starting with firmware v3.0, the maximum output rate has been increased to 1 kHz. To accommodate this change while maintaining compatibility with existing integrations, the output rate is now fully configurable, allowing you to select any frequency between 1 Hz and 1 kHz. During migration, the default setting will be at 200 Hz to ensure integrity of your current setup.
Magnetic calibration data
The SBG_ECOM_LOG_MAG_CALIB message previously supported an output rate configurable between 1 Hz and 50 Hz. Starting with firmware v3.0, it is now exclusively output when the data is available, corresponding to "New Data" setting. During migration, the output rate for this message will automatically be set to "New Data".
Magnetic calibration mode
In firmware versions earlier than 3.0, the calibration mode ("2D or 3D") was not saved. As a result, during migration, it is impossible to determine whether the user performed a 2D or 3D calibration. To maintain consistency for users who used 2D calibration -and for whom it would be critical to set a 3D when they perform a 2D- the setting will default to 2D calibration mode. If you have done a 3D calibration, please update the configuration accordingly after the migration.
Magnetometer error model
The SBG_ECOM_MAG_MODEL_NOISY_MAG_TOLERANT definition is no longer relevant and has been removed.
The SBG_ECOM_MAG_MODEL_NORMAL model has been replaced with SBG_ECOM_MAG_MODEL_INTERNAL_NORMAL, and the SBG_ECOM_MAG_MODEL_ECOM_NORMAL has been introduced to support external magnetometers using the sbgECom protocol.
During migration, the default magnetometer model setting will be SBG_ECOM_MAG_MODEL_INTERNAL_NORMAL if internal magnetometers were previously configured.
Imprecise lever arm selection
Previously, you had the option to indicate that the lever arms for different aidings (GNSS, DVL, odometer) were imprecise, allowing the Ellipse to reestimate them as a state within its embedded sensor fusion algorithm. However, experience showed that this approach is less relevant:
- When you use RTK with imprecise lever arms, the solution no longer maintains RTK accuracy
- If you are in single point positioning mode, a small tolerance for lever arm inaccuracies is acceptable, making the reestimation function unnecessary
As a result, if you have previously set the parameter SBG_ECOM_CMD_GNSS_1_INSTALLATION to SBG_ECOM_GNSS_INSTALLATION_MODE_DUAL_ROUGH, it will be automatically updated to SBG_ECOM_GNSS_INSTALLATION_MODE_DUAL_PRECISE during migration. The precise option assumes a 5cm accuracy for users operating in single point GNSS positioning mode and a 1cm accuracy for RTK users. If it is not the case for your setup, you can use our free lever arm estimation tool in post acquisition to reestimate your lever arms.
The precise option assumes a 5 cm accuracy for users in single-point GNSS positioning mode and a 1 cm accuracy for RTK users. If this does not apply to your setup, you can use our free lever arm estimation tool in post-acquisition to reestimate your lever arms.
DVL convention
Previously, DVL devices were assumed to be operating in the ENU frame. Since SBG products use the NED frame, all necessary conversions were handled within the fusion algorithm to ensure compatibility between the two systems. However, this approach had limitations, as some DVL manufacturers operate in the NED frame, which could lead to incorrect integration within the fusion algorithm.
For that, we have introduced a rough orientation configuration option to configure axes for all setups (ENU/NED). This parameter allows you to specify the orientation of your DVL relative to the INS, in addition to fine misalignment adjustments for small angle discrepancies.
During migration, the rough orientation of the DVL will be automatically adjusted to align with your previous setup. No further action is required to account for this change.
Flag definition and other changes
If you used these status flags and qualified the Ellipse with the firmware 2.x, you should pay special attention during the qualification of Firmware 3.x:
Position and attitude standard deviation
Although overall system performance has increased, the standard deviation reporting has been tuned to improve reliability of these quality indicators. This might result in higher standard deviations outputs in some situations, and particularly in the VG / AHRS modes of operation in firmware 3.x.
Validity flag thresholds
The NMEA outputs from the Kalman filter are now linked to these validity thresholds (heading, attitude, position, velocity) and some fields will stop being populated when above these thresholds). See SOLUTION_STATUS.
Additionally, the default thresholds have been changed.
Alignment flag
The Alignment flag will now align quickly in Vertical Gyro and AHRS modes for low dynamics applications, but when going to Full Navigation this flag will be unaligned and you will need dynamics to finalize system alignment. In any case the alignment flag reflects the full performance reached, which might take time, but it does not prevent the user to start using the navigation device. The SBG_ECOM_SOL_####_VALID flags should be used to assess the system instantaneous quality instead, see SOLUTION_STATUS.
Magnetometer related flags
The magnetometer rejection model been revamped. The MAGNETOMETER_USED_IN_SOLUTION flag behavior might be affected depending on the mode of operation (AHRS/INS), the heading observability and the magnetic interferences. In any case, use the SBG_ECOM_SOL_HEADING_VALID flag to evaluate the heading performance. See SOLUTION_STATUS.
GNSS input requirements in AHRS mode
The GNSS input to be able to use the Ellipse-E, N or D in AHRS mode using NMEA now requires a GGA input, in addition to the HDR and ZDA inputs, at the rates described in the External NMEA GNSS guide. This is because the NMEA HDT string doesn't have any timing information and the GGA has one. So when having both input at the same rate we can timestamp the HDT input and improve the heading accuracy in AHRS mode.
Motion profiles
Some motion profiles have been updated, please make sure to check the description associated in the sbgCenter.
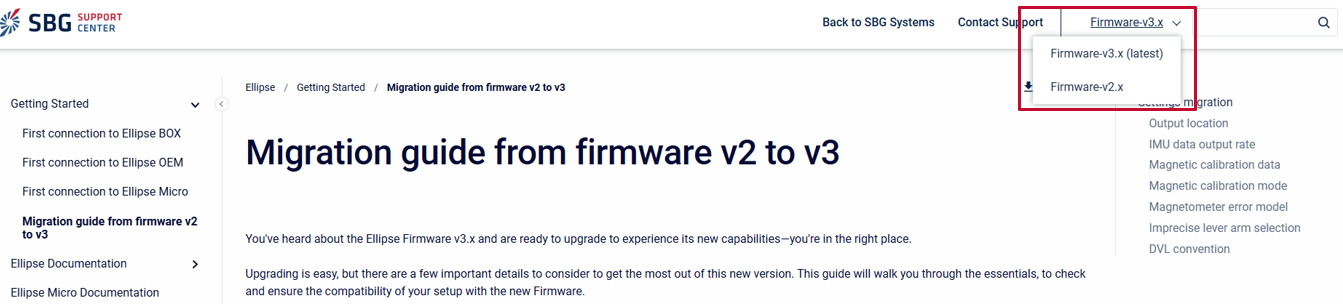
Select the correct documentation
A version picker is available in the top right corner of the "Ellipse" space and on each page. Make sure you select the correct documentation:- Firmware v2.x: For Ellipse firmware v2.x or earlier.
- Firmware v3.x: For Ellipse firmware v3.0 or later.