Definition
A gyroscope is a sensor that measures the rotation rate with respect to an inertial frame.
It will thus measure all the subsequent changes in orientation when it's rotated.
Since the Earth coordinate frame is rotating, a gyroscope lying on the ground will also measure the Earth rotation rate (approximately 15°/h).
Gyroscope output is typically expressed in °/s, or in rad/s.
How do we use gyroscopes
Rotation rates can be integrated at high frequency to measure precisely the sensor orientation. This principle is used at the base of all inertial sensors (Vertical Gyroscopes, AHRS, MRU, INS).
They are also used in navigation (Position and Velocity) determination in Inertial navigation Systems (INS).
Highest performance gyroscopes (typically closed loop FOG based) are so accurate that they can measure the Earth rotation without any bias estimation, and determine a heading without any external heading reference. These sensors are called Gyrocompasses. There are many other techniques that allow to measure heading without doing pure gyro-compassing, and this allows to release the constraints on gyro technology.
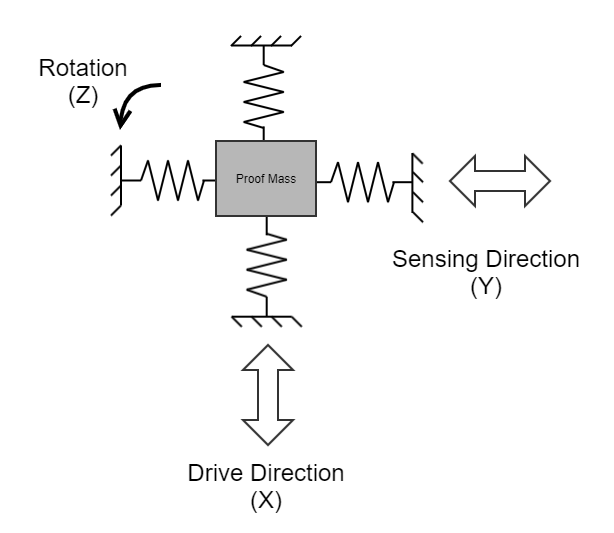
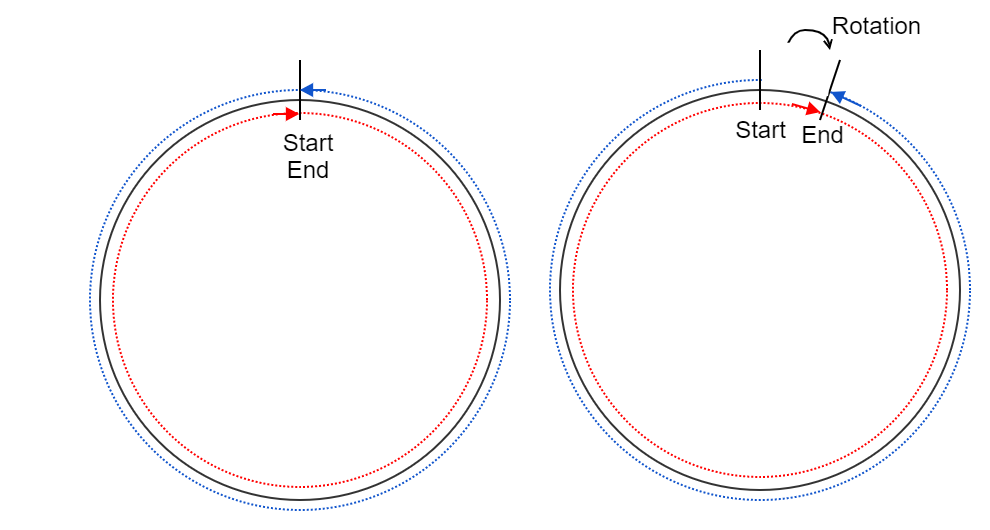
Principle
SBG Systems gyroscopes use 2 principles to measure rotation: