Download PDF
Download page Marine.
Marine
Mechanical installation
The INS sensor can be located anywhere in the vessel, considering the following recommendations:
- Sensor is rigidly fixed to the frame
- Sensor is not moving with regard to other equipment (antennas, sonar, LIDAR, etc...)
- Sensor is far from vibrations sources
- Sensor is not exposed to salty water, unless sub-sea casing (IP-68 is not corrosion-proof)
- When relevant (if magnetometers are used), place the sensor away from magnetic disturbances like high current equipment, radios or moving parts.
Note
SBG Systems IMU are designed to handle vibrations without specific care. Nevertheless in case of highly vibrating environment, a mechanical vibration isolation might be required for proper operation. Silicon or wire dampers can be used for that purpose.
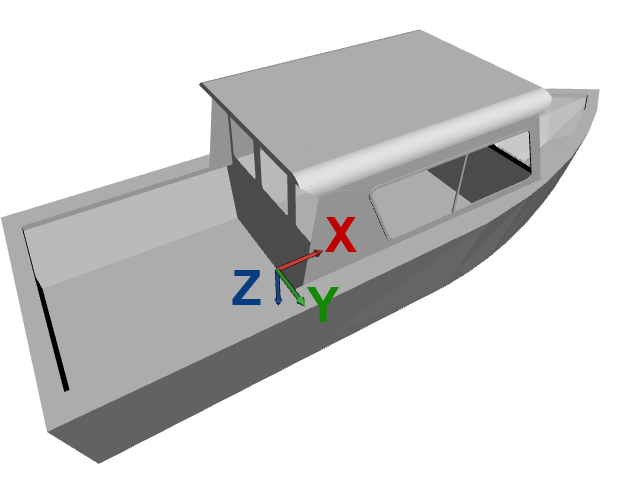
Vessel Reference Frame
The vessel coordinate frame and positive rotations for Euler angles are defined as follows :
- X axis points to the front of the vessel (bow)
- Y axis points to the right (starboard)
- Z axis points the bottom (keel).
Note
The sensor can be placed in any orientation in the vessel. When IMU axes do not match exactly with the vessel coordinate frame, the rough and fine alignment parameters should be corrected through the configuration interface to realign the IMU and vessel coordinate frames.
GNSS setup considerations
When installing your INS with a GNSS aiding, you will need to install the GNSS antennas with a clear view of sky, and fixed with respect to the IMU.
The GNSS lever arms shall also be measured, which are the signed distance, expressed in the vessel coordinate frame, FROM the IMU center of measurements, TO the GNSS antenna.
We usually require these measurements to be precisely performed, within 1cm accuracy.
Note
It's generally not practical to measure with such precision the lever arms, so SBG Systems developed lever arm calibration that enables you to measure rough lever arm estimation (10cm precision) and let the tool refine those measurements.
The GNSS lever arms should be lower than 10m to minimize induced errors.
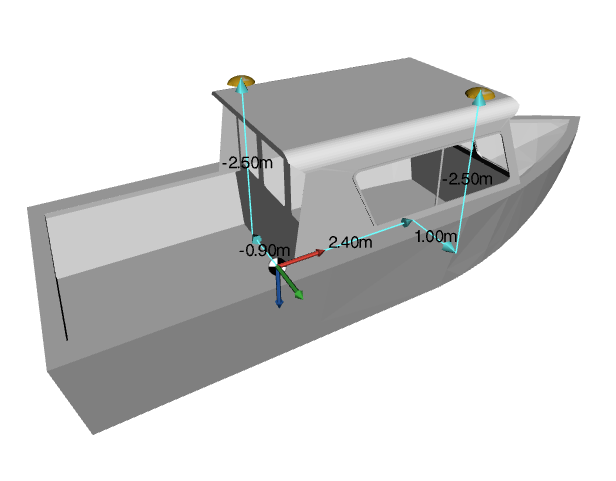
Dual GNSS Antenna Placement
With a dual antenna setup, the INS will be able to keep a stable and precise heading as long as it has a clear GNSS signal. Heading can also be initialized in static conditions.
Dual antenna systems installation will require special care in order to obtain optimal performance :
- The antennas must be fixed with respect to the IMU
- Same antenna type
- Same cables with identical lengths must be used for both antennas. If splitters are used make sure that they are adapted and with the same characteristics
- If antennas are not permanently installed onboard, antennas reference marks (usually the connector position) should be mounted in a repeatable fashion in order to guarantee antennas phase center stability from mount to mount and minimize changes to heading misalignment angle.
- Both antennas must have the same view of sky. Typically avoid placing antennas on each side of a structure or parts that could mask a significant part of the sky
- Baseline of at least 2 meters between both antennas is recommended for best performance
- If the antenna model does not have integrated ground plane, a 10 cm diameter ground plane must be added for both antennas.
Both GNSS antennas lever arms should be measured accordingly.
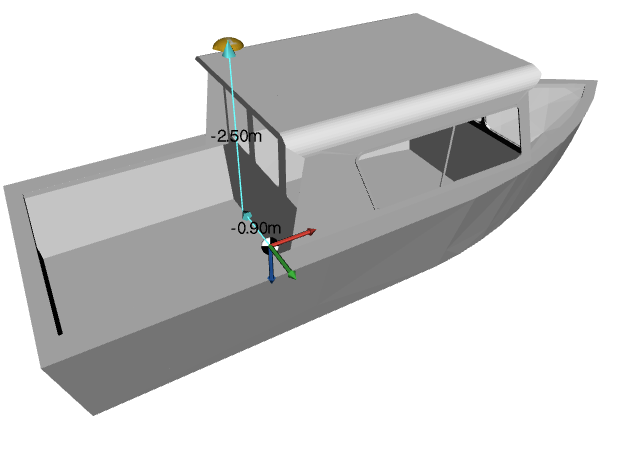
Single antenna installation
Due to the very particular motion of a boat, a system with a single GNSS antenna is recommended only with an INS that supports magnetometers (SBG Ellipse series).
A single antenna installation with GNSS lever arm is shown below: