Download page Attitude & Heading Reference System (AHRS).
Attitude & Heading Reference System (AHRS)
Principle
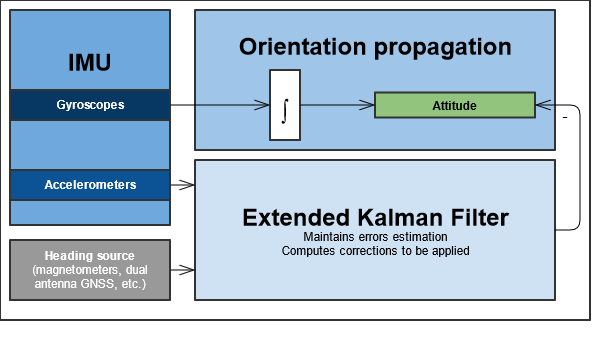
An Attitude and Heading Reference System (AHRS) is an inertial sensor comprised of an IMU and another sensor used for heading determination (typically a magnetometer).
It uses vertical reference (gravity) to stabilize the IMU. The gyroscopes data is fused with the gravity measurement from the accelerometers in the Kalman filter to provide Roll and Pitch angles. For Heading computation, an aiding sensor can be used to stabilize the heading such as a magnetometer or a dual antenna GNSS input.
An AHRS takes the advantage of gyros to provide accurate roll, pitch and yaw outputs, in low to medium dynamic conditions. It is also very easy to setup and use.
However, its overall precision might degrade in a dynamic or magnetically disturbed environment due to the impossibility to distinguish accelerations from the gravity (vertical) reference.