Download PDF
Download page Ship Motion Measurements.
Ship Motion Measurements
Real-Time Ship Motion
Aside from the EKF, the SBG Systems inertial sensors compute at 50Hz ship motion data from accelerometers double integration. As this double integration generates drift due to orientation error or sensor bias, the best way to get a stable output is to use a high pass filter that will remove any constant component in the motion.
The proper behavior of this high pass filter is ensured by an automatic filter tuning, taking into account changes in sea state conditions. This feature is functional for swell periods up to 20 seconds for real time heave on SBG Systems products.
Due to high pass filter design, the heave, surge and sway data will always return to zero in static conditions at the vessel center of rotation.
Ship Motion availability
Only Marine units can output Heave.
Surge and Sway are not available with Ellipse series.
Surge and Sway validity
Surge and Sway are only relevant in near static applications such as buoys, and values are affected by orientation errors. They are outputted only at the IMU measurement point.
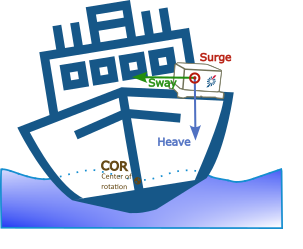
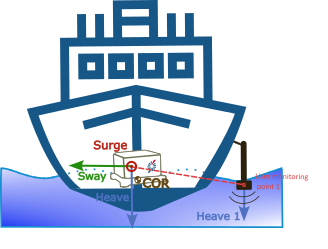
Ship motion reference frame
The ship motion outputs are neither in a NED coordinate frame, nor in the vessel coordinate frame, but in a specific coordinate frame :
- Center of the frame is the output point location.
- Heave is the vertical position, positive pointing downwards ;
- Surge is the longitudinal position, in the horizontal plane and positive pointing toward the vessel bow ;
- Sway is the transverse position, in the horizontal plane and positive pointing toward the vessel starboard side.
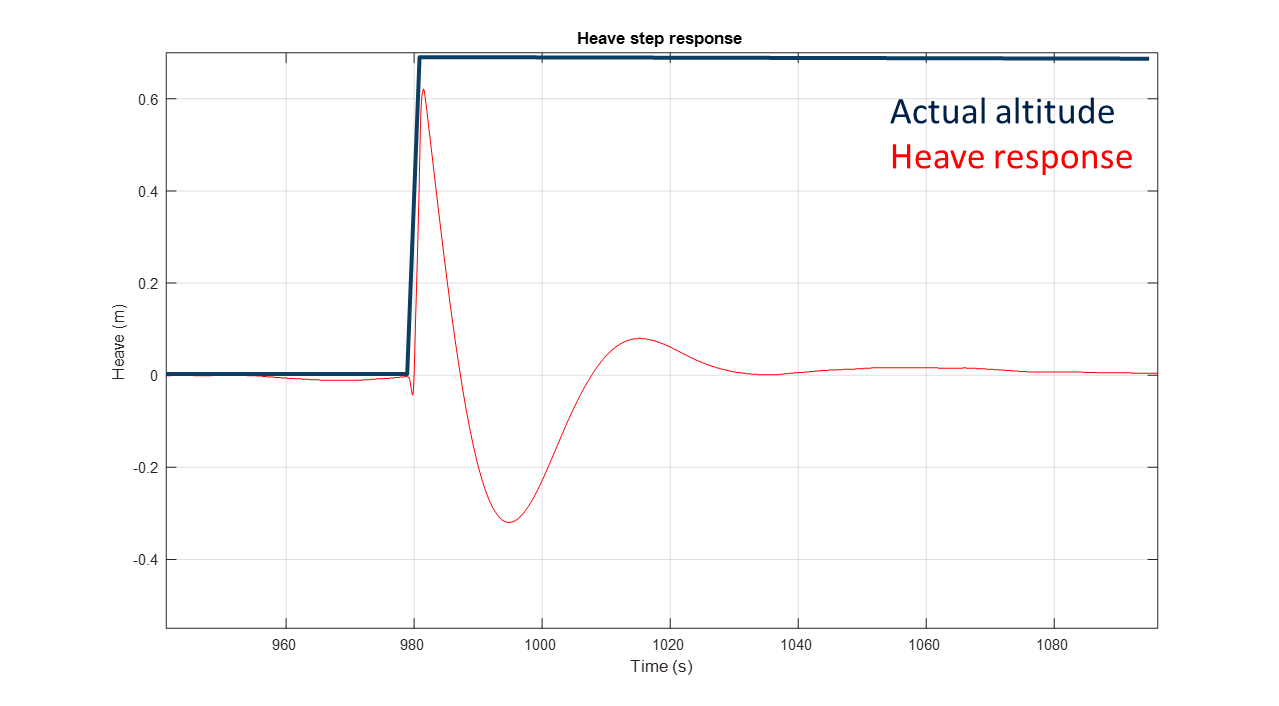
Heave step response
If a step is performed, the heave output will show the step and then will smoothly come back to zero. It may take a few minutes for the output to be stabilized after a step. The following graph shows a typical step response. Note that the time to recover a 0 heave output may depend on the previous sea state. The overall shape will remain the same however.
Heave and Tide
Heave does not account for tide.
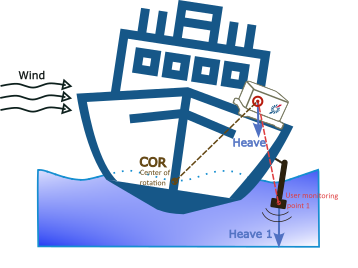
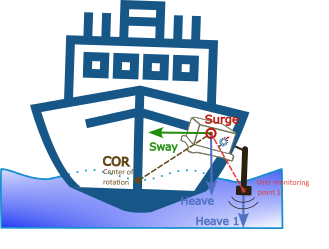
Center of Rotation and Deported Heave Operation
When analyzing the heave motion, we can find that part of the heave motion is due to the vessel rotation.
This part differs from one place to another, and is canceled at the Center of Rotation. Another location will affect the heave in dynamic (roll/pitch motion), or semi static (wind, unbalanced or ballast effect).
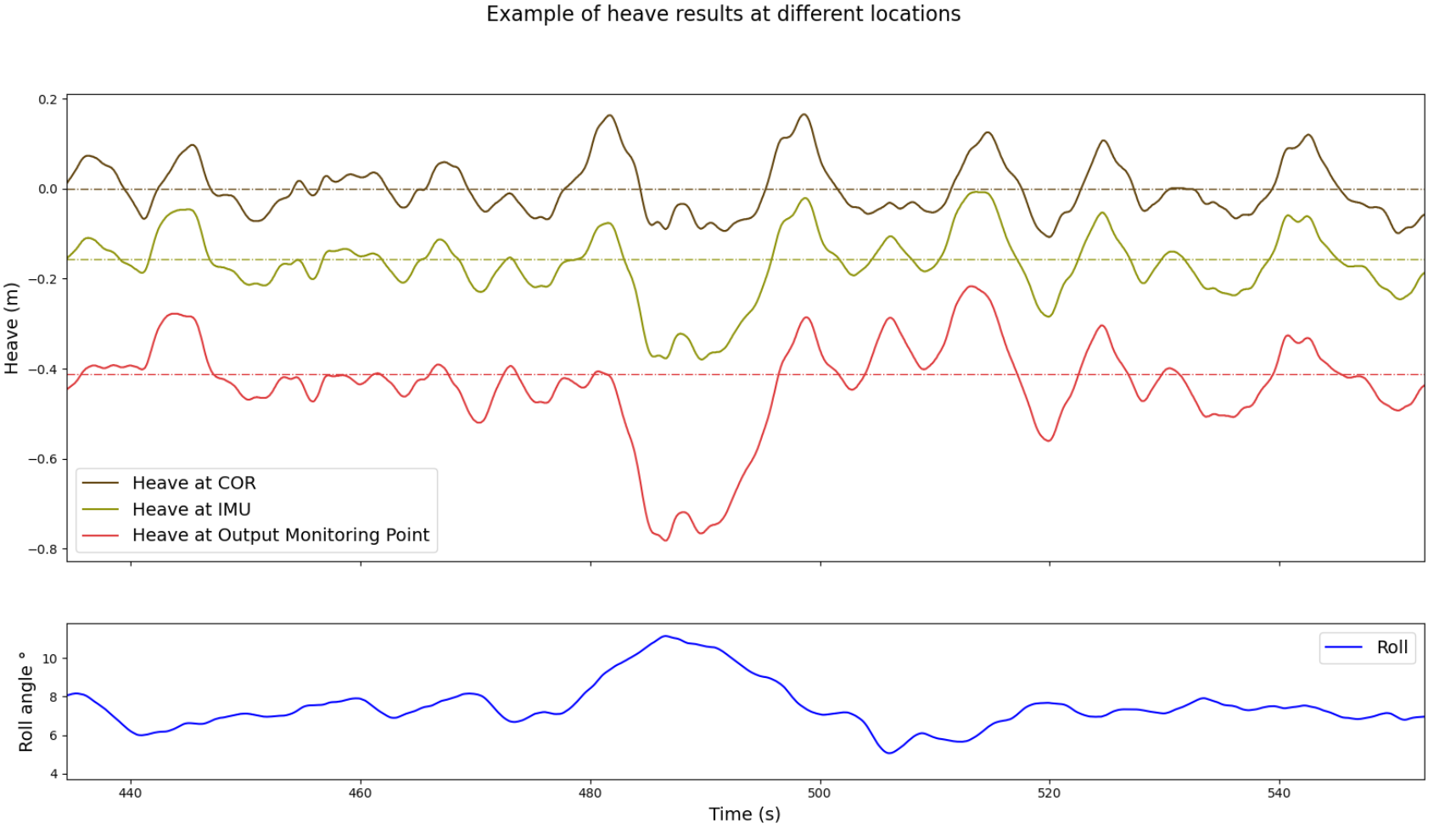
The following picture shows the effect of the rotation induced heave at different locations on the vessel. In this example, the wind will induce a negative non zero heave mean at port side (amplitude will be higher at monitoring point since it is further from COR). This example is also showing that the shape and amplitude of the heave are different depending on the output point selected.
In order to optimize the heave performance, please find below the motion sensor placement recommendations :
- Placing the sensor in the vicinity of the center of rotation and properly indicate the point of interest (e.g. direct mounting on top of the MBES sonar) by using a "Monitoring Point". Only Heave measurement can be deported (not Surge and Sway that must stay at IMU) :
- Placing the sensor anywhere (more accessible place and or closer to the point of interest) and properly setup the Main Lever Arm (COR) and the monitoring point.
In both cases it is important to accurately measure lever arms since any dimensional or angular error will introduce some errors in the estimated output parameters (Heave/Surge/Sway).
IMU misalignment
When the boat is stationary, IMU misalignment with vessel should be precisely accounted for and corrected either mechanically, or by software configuration in order to provide consistent heave values.
Previous Heave measurement behavior
Before Firmware 5.1.149-stable (for HPI products) and the Ellipse firmware v3, the Main Lever Arm (COR) in SBG Systems products was not taken into account in the heave measurements resulting in a less accurate heave estimation. This is particularly true since mean heave value was always 0 at the IMU location (which is not always the case when wind, or current, or moving load are affecting the boat attitude).
Heave Enhanced Altitude
In the marine survey industry, there is often the question whether using the heave output or the Kalman filtered altitude output is preferred. In case of good GNSS condition the RTK altitude can be very precise and simplifies the setup as the surveyor don’t need to bother with tide compensation. However, even when fused with inertial sensors, the RTK altitude might be disturbed in case of difficult GNSS environment such as bridge crossing.
On the other hand, the heave algorithm allows precise relative measurements, without specific errors during difficult GNSS conditions. However its more complex to use due to the tide compensation needed.
The Enhanced Altitude mode algorithm takes the best of these two worlds by merging the heave output with the RTK altitude, providing accurate and absolute altitude measurement in both good and challenging GNSS conditions.
This algorithm can only be used with the marine motion profiles and in combination with a precise position like RTK or PPP with fixed carrier ambiguities. This Enhanced Altitude mode can be disabled if needed.
Enhanced Altitude availability
This mode is only available in High performance products designed for hydrographic applications.
Delayed Heave
Available on higher grade units designed for hydrographic applications (Ekinox, Apogee and Navsight Marine for example), the Delayed Heave algorithm makes use of past measurements to greatly enhance heave performance. Common phase errors observed in real time Heave operation are seamlessly corrected and the filter will provide even better performance under long swell period conditions.
The Delayed heave algorithm has a fixed delay of 150s. The output messages have the same format as real time ship Motion mode and a time-stamp is used to correctly date the ship Motion data.
This algorithm is ideal for applications that don't require strict real time operation such as seabed mapping. The real time Heave operation remains available to get a first heave estimate before the delayed heave data becomes available.
Time considerations
As the Delayed heave is a delayed algorithm, the unit must remain turned ON in normal operating conditions at least 150s before, and 150s after the actual survey path is performed to enable full data acquisition.
Post-processed Heave
In post-processing software such as Qinertia, the Heave is re-calculated and improved compared to real time Heave or delayed Heave thanks to the Forward/Backward and Merged processing.