Download page INS benefits over MRU in Hydrography.
INS benefits over MRU in Hydrography
In Marine Survey applications, it is critical to compensate the SONAR measurements from the ship motion. In the same time, a position input is required to geo-locate the point cloud. For many years, the traditional way to do so was to integrate two separate components : one Motion Reference Unit (MRU), and one GNSS receiver, capable of RTK processing to achieve centimeter precision. If this solution is suitable for many basic hydrographic applications, it may struggle in more challenging conditions like bridge survey or operation in rough sea.
Principle
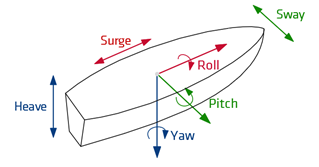
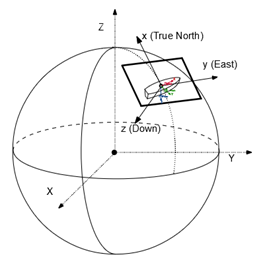
An MRU (Motion Reference Unit) also called AHRS (Attitude Heading and Reference Systems), is a dynamic inclinometer. It uses gyroscopes to detect the rotations and accelerometers to detect gravity, and compute its orientation to provide Roll and Pitch. It may use the Earth Magnetic Field or Earth Rotation rate to detect its heading (in such case we will talk about a Gyro-compass). It also uses its accelerometers to detect the waves motion and provide the Ship Motion (Heave Surge and Sway) measurement. MRU performance is optimal in low dynamic applications, and can be significantly affected by dynamics. An INS is a Full Inertial Navigation System that will use GNSS aiding as primary aiding source to complement the inertial measurements. Thanks to the inertial and GNSS coupling, the INS is able to output position even in case of GNSS disturbances. Moreover the INS orientation output is insensitive to dynamics, making it perfect for operation in challenging conditions.
MRU Outputs
INS Outputs
Advantages
A quick comparison between MRU with an independent GNSS receiver and INS clearly indicates that if the navigation data are necessary, then INS will be a preferable solution rather than MRU with GNSS.
MRU with GNSS
INS
Affordability
+
++
Ease of configuration
+
++
Performance
++
+++
Outputs
+
+++
INS Measurement's improvement
In an INS, the Heave algorithm can be aided by the GNSS velocity to keep optimal accuracy even in rough sea, where a single MRU would purely depends on its accelerometers. This means that even if we are looking purely into attitude and ship motion, the GNSS will already bring a performance gain.
Now if we also consider the position is necessary, then using an INS (rather than MRU+GNSS) will greatly improve the position performance. The inertial will indeed compensate for the GNSS inaccuracies and outages.
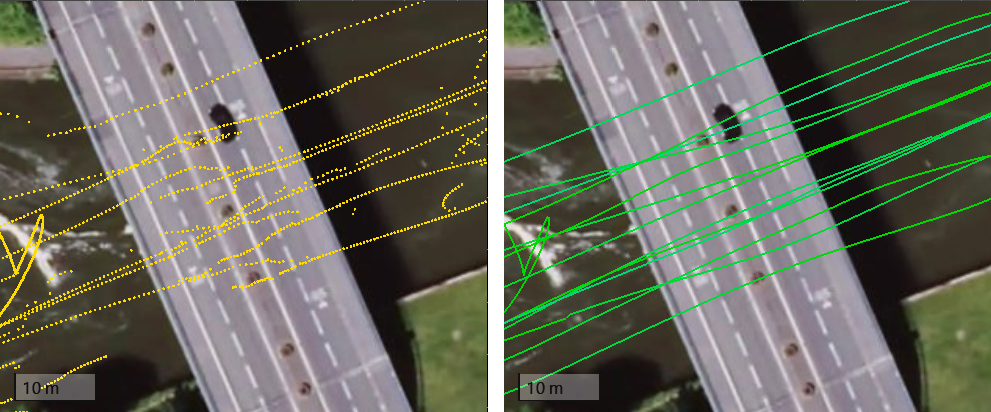
A typical example is a bridge survey application. When going under a bridge, an independent GNSS receiver position would be inaccurate or even lost. Using an INS instead of MRU + GNSS will allow a continuous position instead. The next 2 pictures show the comparison between a GNSS only (in yellow) compared to a INS position (in green), while cruising under a bridge during a survey.