Download PDF
Download page Reference coordinate frames.
Reference coordinate frames
This article is a simplified version of the geodesy skills needed for inertial navigation. Should you want further information, we recommend you visit geodetic sites such as: https://itrf.ign.fr/en/background
Geodetic reference system
A geodetic reference system is a group of elements that enables to locate points using coordinates. Elements are:
- Origin of the coordinates system
- Orientation of axis
- Scale of axis
- Reference ellipsoid
The most important geodetic reference systems are the different realizations of the ITRS (International Terrestrial Reference System) which are realized by the international scientific community. These realizations are produced at the same time than technologies progress and the number of data increases to improve results. It is then better to use the latest realization to get the best accuracy. Currently it is the ITRF2014 (International Terrestrial Reference Frame 2014).
As the GNSS technology has been created by the US defense, they developed their own geodetic reference system that corresponds to the different realizations of the WGS84 (World Geodesic System 1984). Initially, all positions obtained by GNSS measurements were expressed in WGS84. It explains it is the most known one. The latest realization, G1674, is aligned with the ITRF2014 but some small differences make them agree at the centimeter level only. For example, the reference ellipsoid of the two systems have 0.1mm variation for the semi-minor axis.
Coordinate reference frame vs Augmented GNSS solution
The solution obtained by GNSS depends on the type of measurements. For RTK or PPK positioning, the solution is in the base station coordinates system. For PPP positioning or using orbits and clock corrections from IGS, coordinates are expressed in ITRF2014.
ITRF2014 vs WG84
As the two geodetic reference systems (ITRF2014 and G1674) are really close, there is no transformation parameters given and it’s possible to consider that they are the same system (positions obtained by GNSS are rarely more accurate than one centimeter).
Type of coordinates
For each geodetic reference system, it is possible to use three types of coordinates : Cartesian, geographic or projected.
Cartesian coordinates
It is the easiest way to locate a point in a 3D space. It uses the three orthogonal axis (commonly X, Y, Z) of the geodetic reference system.
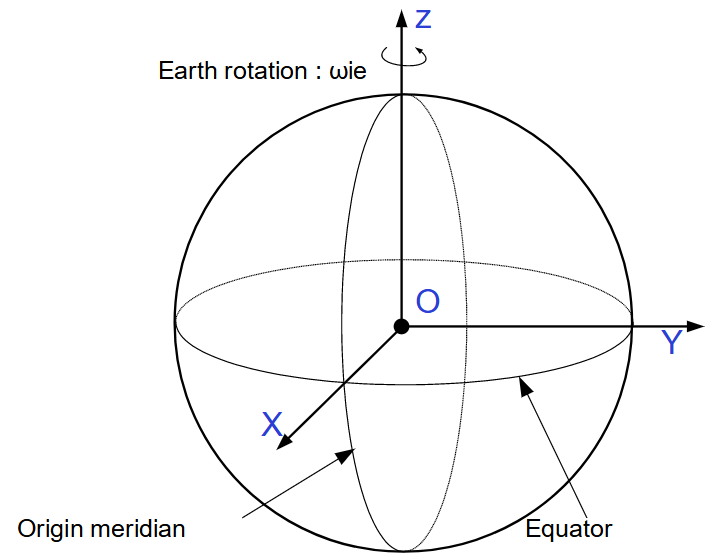
For example, the ITRF2014 has for origin the center of mass of the Earth including oceans and atmosphere. The Z axis is pointing to the north rotation pole. The XOY plane coincides with the equatorial plane. Orientation of the X and Y axis are more difficult to understand and have no real interest here. The scale is chosen to correspond to the meter.
ECEF (Earth Centered Earth Fixed)
If the origin of the coordinate system is close to the Earth center of mass, and the X and Y axis rotate around the Z axis with the Earth (so it can't be used as an inertial reference frame), this system type is called ECEF (Earth Centered Earth Fixed) cartesian frame.
Although this type of coordinates is very easy to use, it’s principally utilized by the scientific community. Most users prefer the geographic coordinates.
Geographic (or geodetic) coordinates
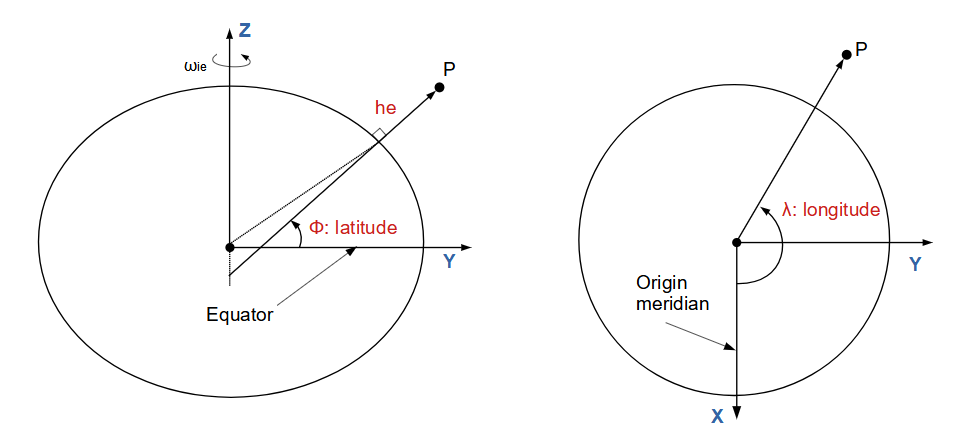
Coordinates above can be also express in geographic form. By using the reference ellipsoid associated to the geodetic reference system, a point with Cartesian coordinates is projected on the surface of the ellipsoid to calculate two coordinates : longitude (λ) and latitude (ϕ) which are angles. Then a distance can be determined from the center of the ellipsoid: ellipsoidal height.
The longitude (λ) is the angle in the equatorial plane from the origin meridian to the projection of the point of interest onto the equatorial plane.
The latitude (ϕ) is the angle in the meridian plane from the equatorial plane to the ellipsoid normal. Note that, in most situations, the ellipsoid normal will not intersect with the center of the Earth.
The ellipsoidal height (he or h) is a simple distance between the point and its projection on the ellipsoid.
Projection (or plane coordinates)
When working on a small area, it is possible to use a defined projection for a geodetic reference system. This type of coordinates refers to a 2D space where all the points of the reference ellipsoid are projected on a plane (there are many ways to do a projection with different effects on the result). The advantage of a such a coordinates system is its ease of use for map creation. However, as the reference surface is a transposition from an ellipsoid to a plane, some deformations appear. The commonly used coordinates are E, N (East, North).
It’s important to understand that a projection is associated to a geodetic reference system so two projections don't always have the same base.
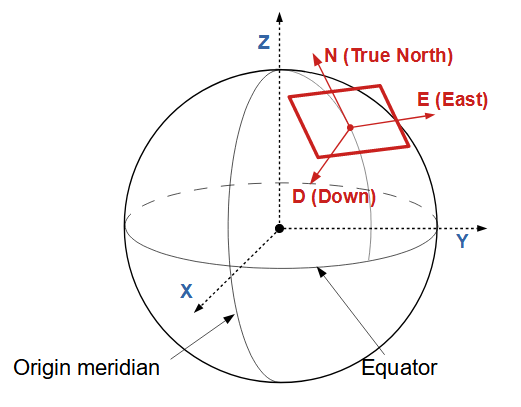
The NED frame (North East Down)
In some cases requiring relative positioning, a local specific Geodetic frame is used in order to ensure best accuracy. In navigation this local frame refers to the North, East, Down rectangular frame (NED).
This frame is obtained by fitting the local ellipsoid shape in a tangent plane at the current position. This coordinate frame is attached to a fixed point relatively to the Earth surface.
The X axis is turned toward North, the Z axis turned down, along the local ellipsoid normal, and the Y axis completes the right hand rule, pointing East.
As it's impossible to perfectly fit the ellipsoidal shape in a plane, this frame is only suitable for local measurements.
Navigation algorithms Reference frame
The navigation algorithms internally account for this frame rotation when the vehicle moves at high speed in order to ensure best navigation performance.
Notion of altitude
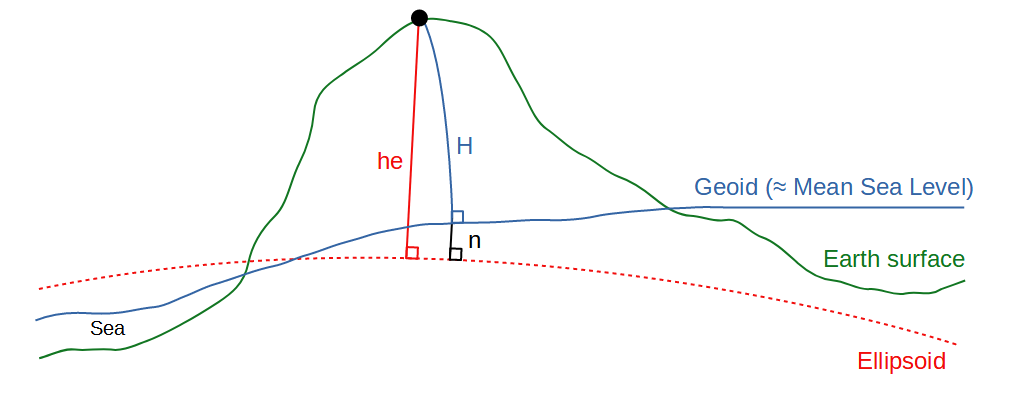
The altitude (H) is a notion extremely complex, so it's will be briefly developed here. To be defined, it’s necessary to explain what is the geoid (which can be understood as the Mean Sea Level).
The geoid is an equipotential surface of gravity. It means it is a surface where the norm of each point corresponds with the local gravity direction. The latest world model is the EGM2008 (Earth Gravity Model). As the local gravity depends on a lot of things, its surface is absolutely not regular as the ellipsoid can be, so they are not equal.
Altitude is then a distance between a point and its projection on the geoid with distance following the gravity direction. It's a physical definition.
It is possible to convert ellipsoidal height into altitude by using the gravity model. In the schema below, he is the ellipsoidal height, H is the altitude and n is the geoid undulation. So it's easy to deduct the relation: he = H + n.
INS MSL
The INS provides both altitude referenced to the Ellipsoid and Mean Sea Level using a built in EGM96 model with 15 arc sec resolution.
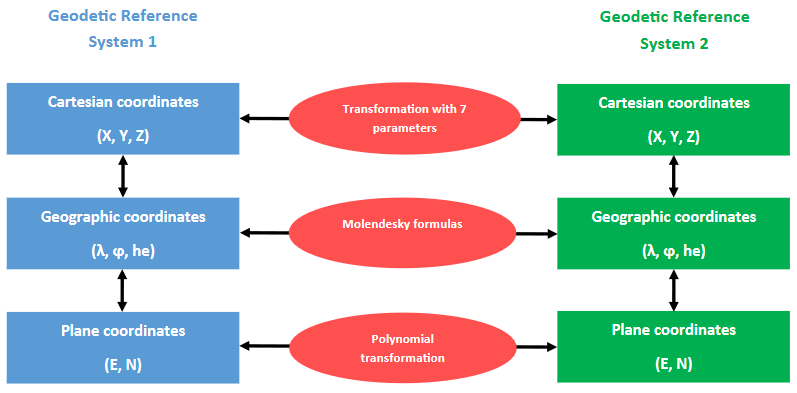
Transformations between different geodetic reference systems and different types of coordinates
Sometimes, you can have positions expressed in several geodetic reference systems or different types of coordinates so you need to make them all compatible. For this, the graphic below shows the steps to go from one system to another. You will notice there are multiple ways to convert coordinates to an other geodetic reference system but the best to keep accuracy is to use the transformation with seven parameters (three rotations, three translations and a scale factor). This can only be done with the Cartesian coordinates so you have to start by transforming your coordinates to their Cartesian form.
14 parameters Datum shifts
If the geodetic reference system takes in consideration the tectonic plates movement, the 7 parameters transformation becomes a 14 parameters transformation (velocity of all translations, rotations and scale factor are added).