Download PDF
Download page Checking Data Quality.
Checking Data Quality
Qinertia offers very powerful and intuitive tools to analyze and review the solution quality. We will only cover basic data quality review here such monitoring the solution standard deviation, the solution type and the forward / backward separation.
Solution Type
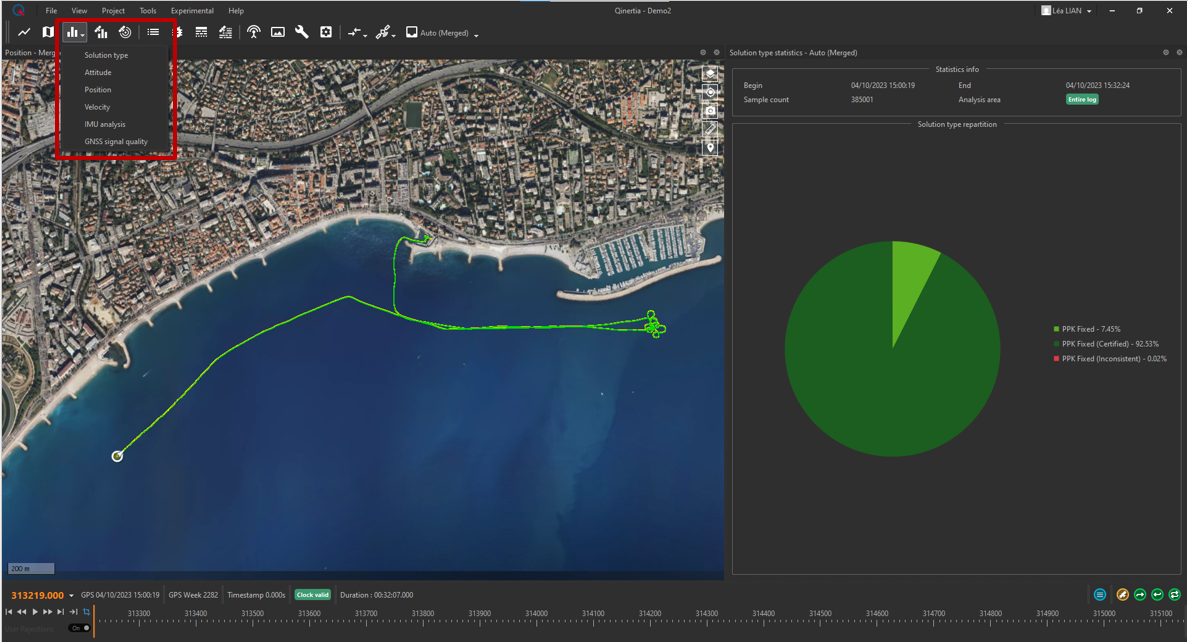
This first indicator to review is the solution type over the whole log. To do so, you can simply open the Solution Type pie chart as shown in the screenshot below.
We see in our log we have mostly RTK Fixed solutions that are the most reliable and accurate positioning mode. You can also notice there are different type of PPK fixed solutions:
- PPK fixed (Certified): PPK is fixed in both forward and backward directions, with consistent solutions.
- PPK fixed: PPK is fixed in one or both directions within acceptable tolerance, but the forward-backward difference does not meet the strict criteria required for certification.
- PPK fixed (Inconsistent): PPK is fixed in both forward and backward directions, but the solutions are inconsistent.
You can also change the trajectory map display to show the posit1188ion type instead of the default position standard deviation. To do so, just click on the ![]() icon located on the top right corner of the trajectory map and select EFK display mode→Position Type instead of Position Quality.
icon located on the top right corner of the trajectory map and select EFK display mode→Position Type instead of Position Quality.
This will display the INS position using the same color scheme as the solution type pie chart above. You can then easily pinpoint where the solution was relying only on inertial data. In the example below, we see that under this train bridge, the solution was using only lateral velocity constraints relying only on inertial sensors.
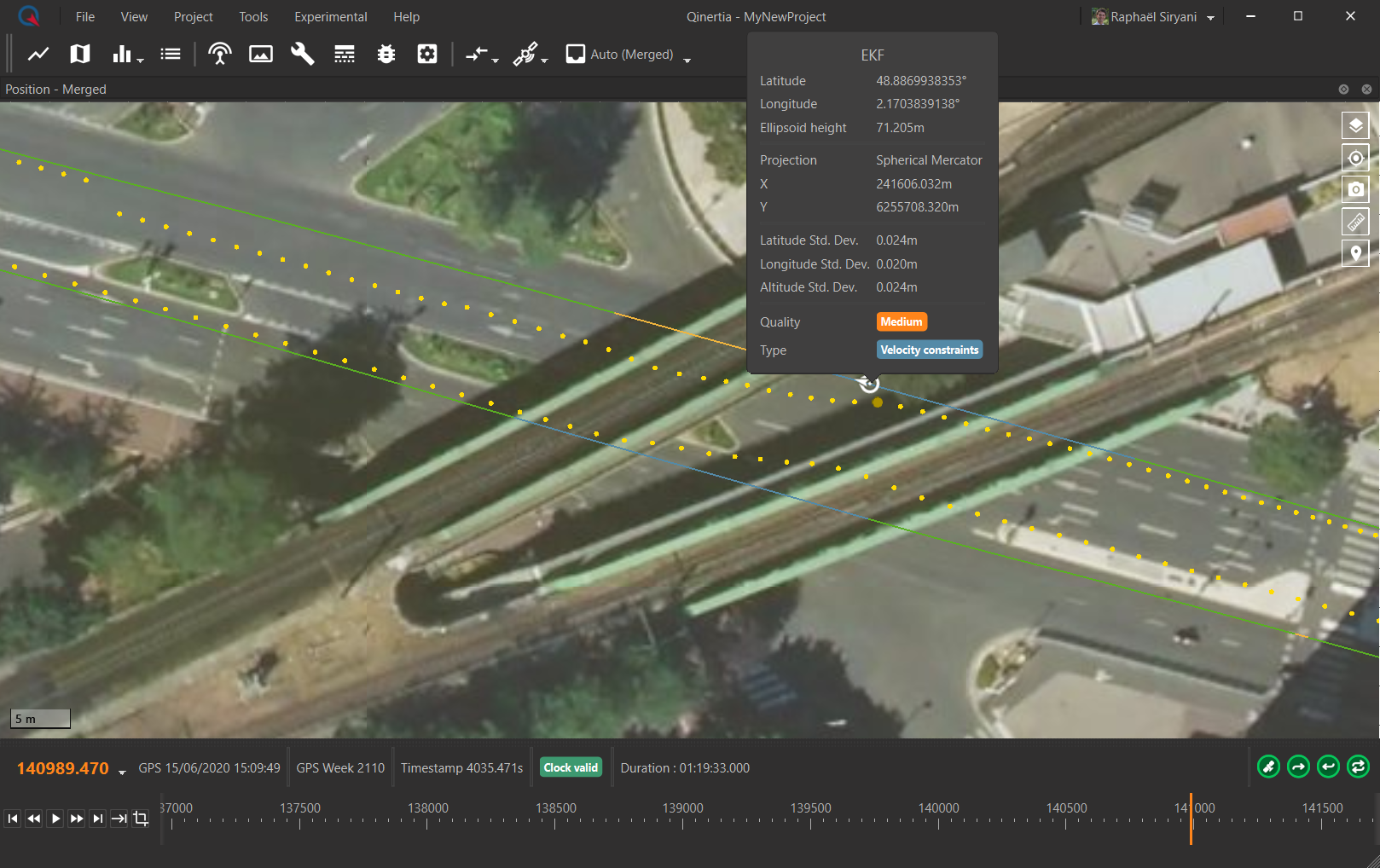
You can also hover your mouse on the trajectory to access information for this epoch such as the estimated accuracy (standard deviation), the position type and quality, etc. You can do the same for the real time GNSS positions that are represented by yellow dots. You can easily compare the real time GNSS only solution to the INS one and as you can see on the screenshot above, the INS improve a lot the accuracy.
To finely review the accuracy, you can use the time line to navigate through epochs and even play the recording to see in real time how the solution behave.
Qinertia is the only post processing software to show all epochs so if you have a 200 Hz IMU and a 2 hours log, Qinertia is displaying more than 1 440 000 points and you can navigate and assess the quality of each single point!
Standard Deviation
An other important parameter to check is the accuracy estimated by Qinertia for several quantities such as the position and the orientation.
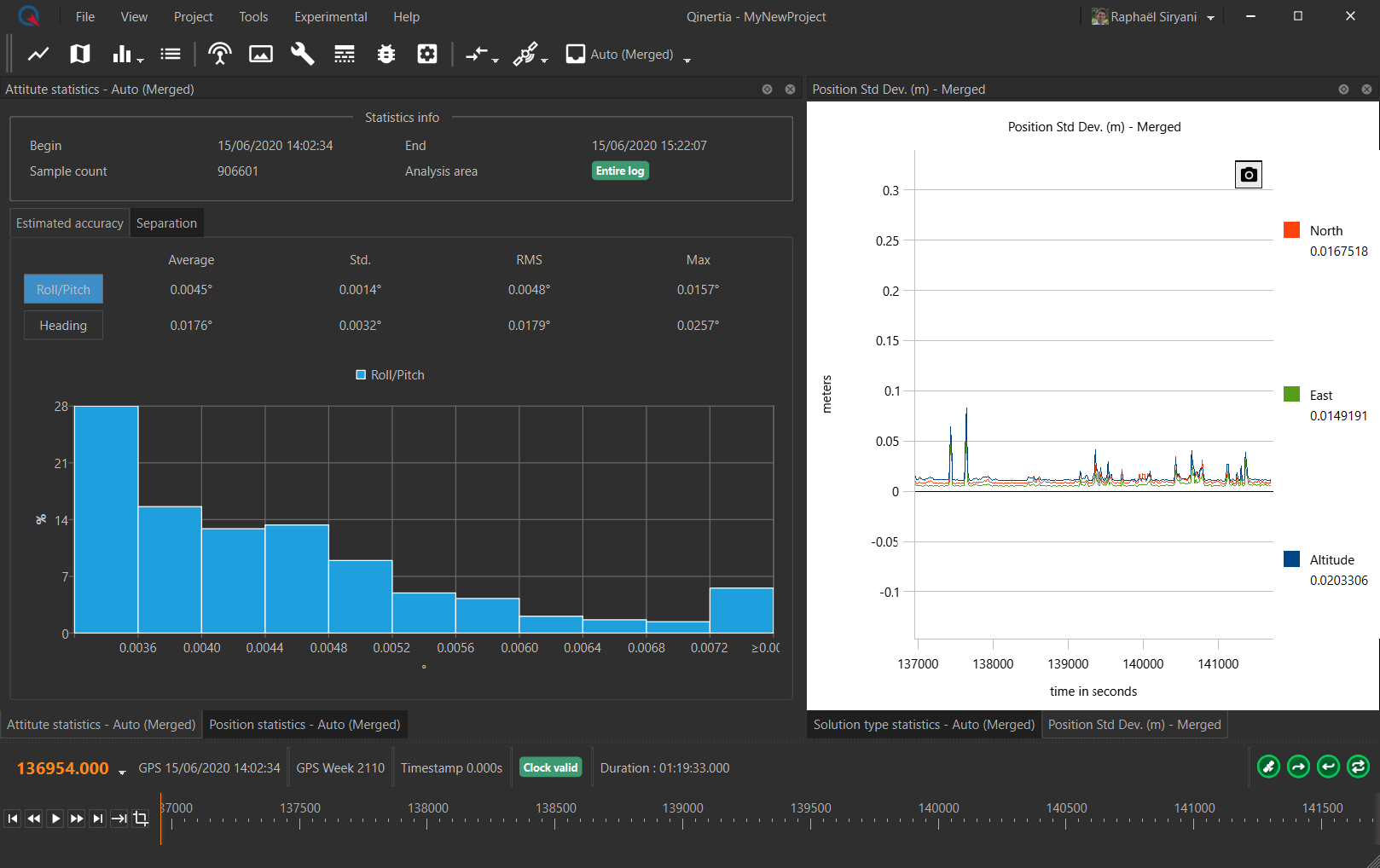
In Qinertia, you can display the estimated accuracy as time series plots or, if you would like to get an overview, show histograms with metrics on the whole processing.
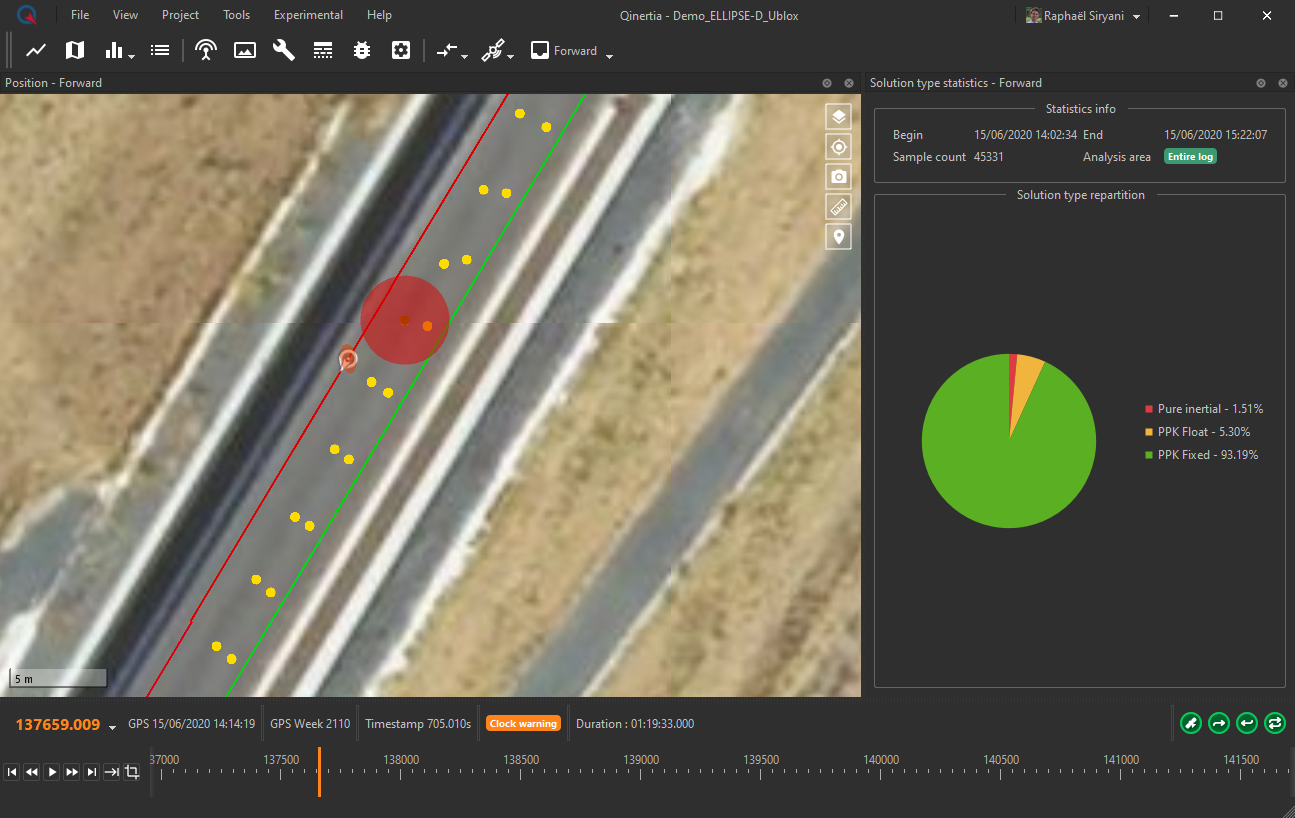
As for the position type, you can also view the estimated accuracy directly in the trajectory display. The INS solution is represented using a color code ranging from green, for solutions with an estimated position accuracy below 2 cm, to red for the ones having an estimated error above 60 cm.
In addition, the position accuracy is displayed using a 2D ellipse so you can also view graphically how the error is distributed between a north, south, east and west error. The real time GNSS solution quality is also displayed as an ellipse using the same color code as shown in the graph below.
Understanding Standard Deviation
The estimated accuracy, also called standard deviation, is a mathematical statistical estimation of the system accuracy based on complex models that includes the IMU sensor errors, the GNSS accuracy, the vehicle dynamic and much more.
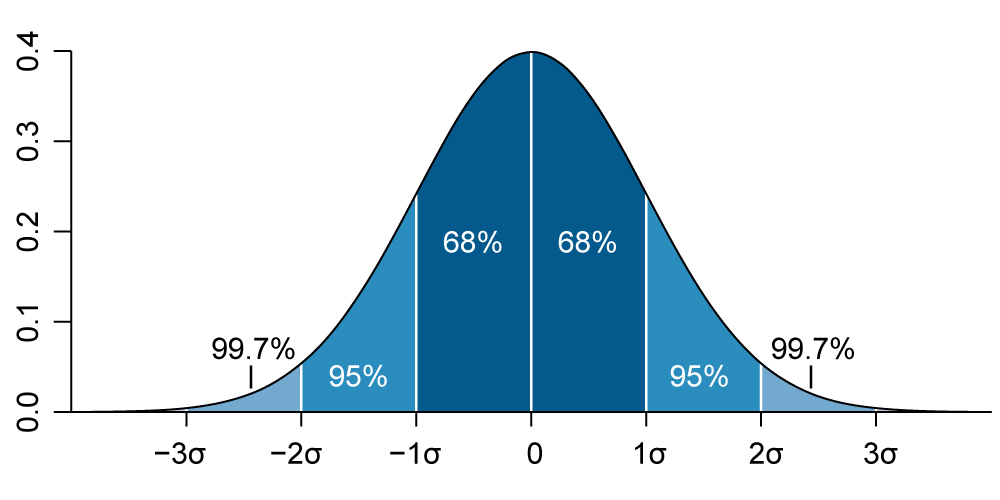
This estimation is expressed as a 1-sigma or RMS (Root Mean Square) error and should be interpreted carefully. In a typical Gaussian distribution, the 1-sigma error represents 68% of the population. In other words, the returned standard deviation reflects an error that is actually lower 68% of time. As a general rule of thumb consider that the actual error will almost always be below 3-sigma or three times the returned standard deviation. As you can see on the plot below, a 3-Sigma error represents 99.7% of the population.
Forward/backward separation
The forward / backward separation is specific to post processing and is a good indication to review the solution consistency. Qinertia computes in the forward and backward directions and then combines both solutions in one optimal merged output. The separation is simply the difference between the forward and the backward solutions.
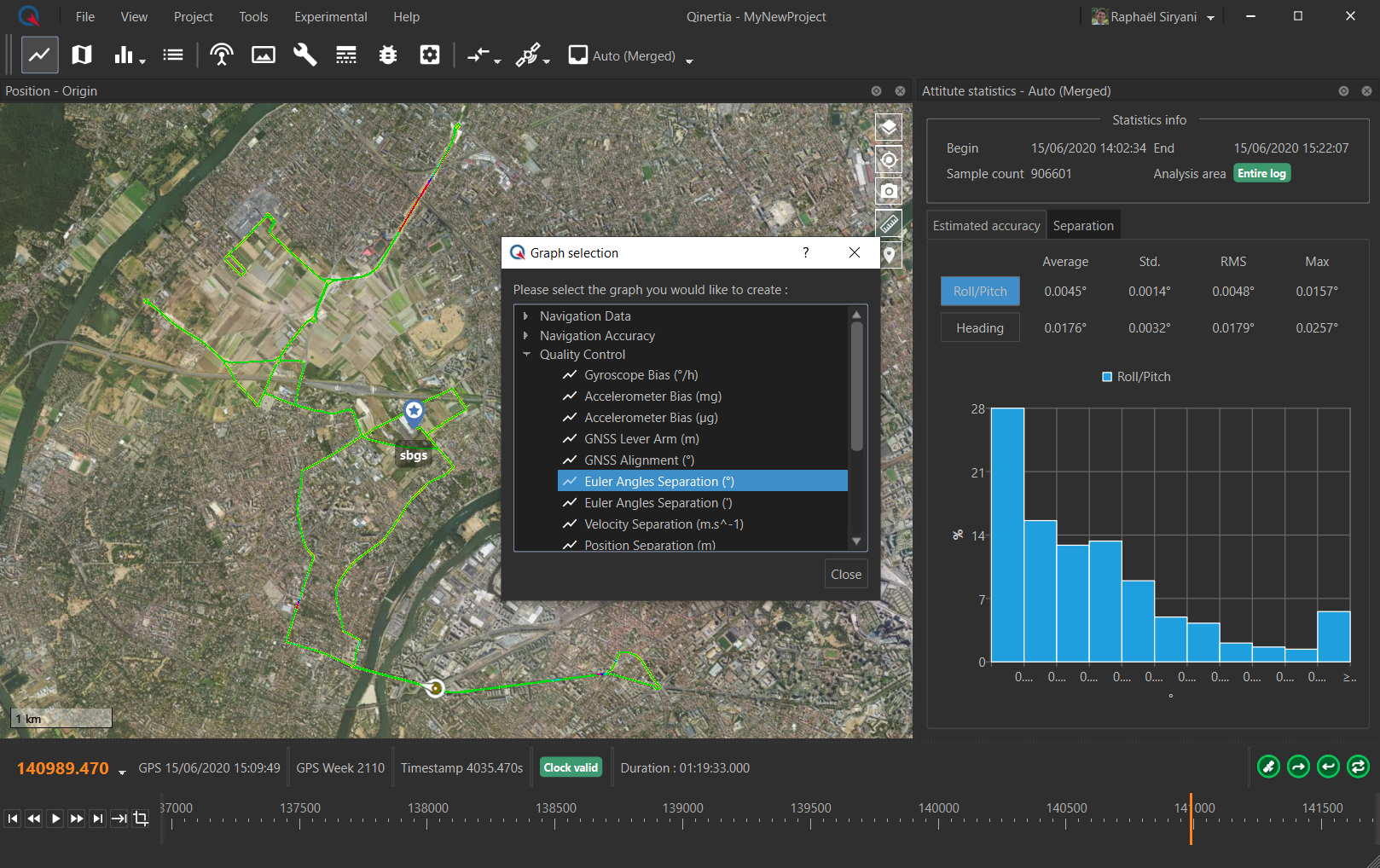
In Qinertia, you can display the separation for orientation, position and velocity as histograms as shown below.
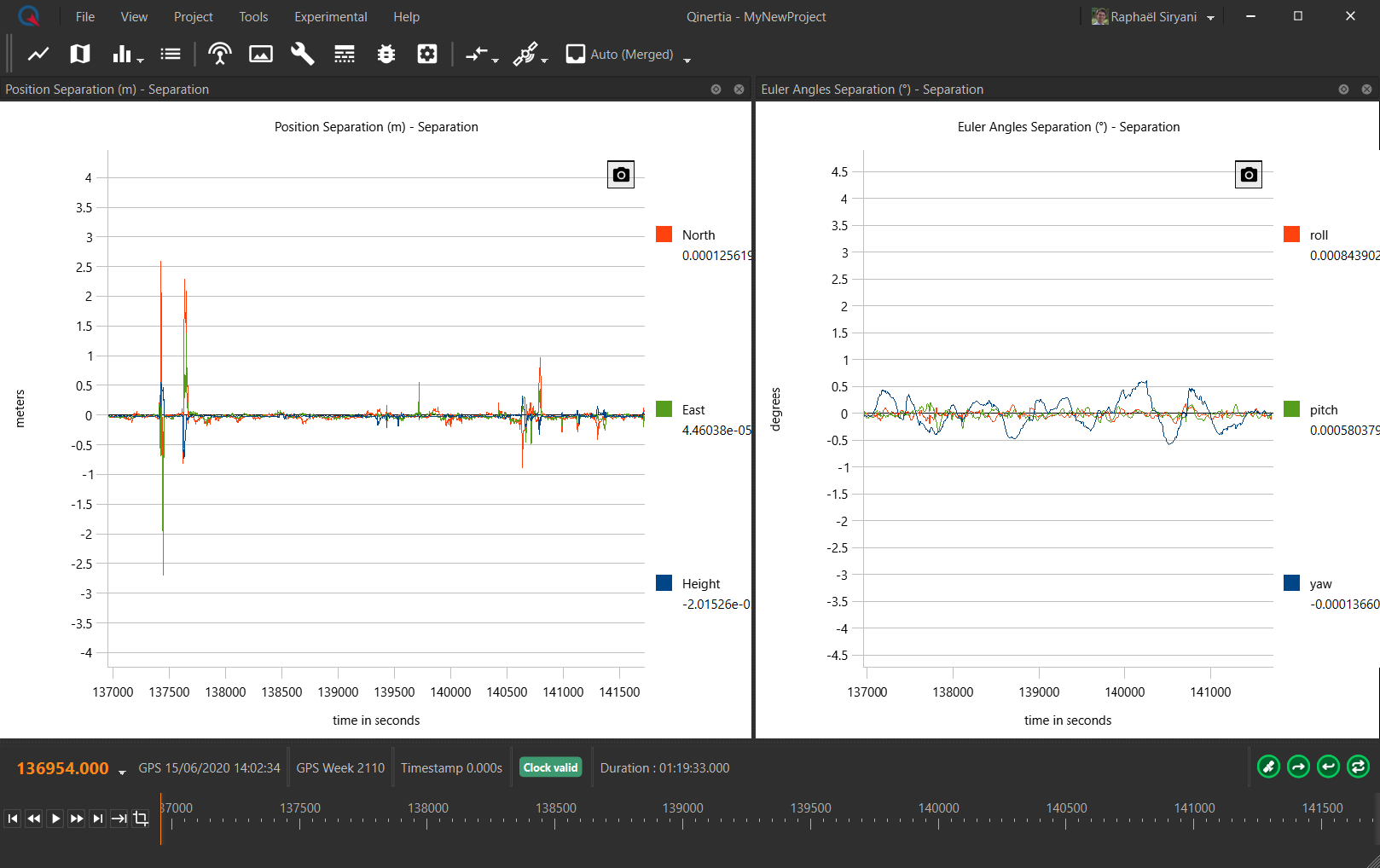
You can also plot several time series to finely review where the separations are large. In the screen below, we see the separation for the position as well as for the euler angles.
Understanding the separation
The separation could be quite confusing to interpret so please read this carefully. A small separation means that both the forward and backward computations have found the same solutions and are consistent. It thus provides a good level of confidence the solution is accurate in this area. However, if there are large discrepancies between the forward and the backward solution, it doesn't necessary mean the post processed (merged) solution is not accurate nor reliable.
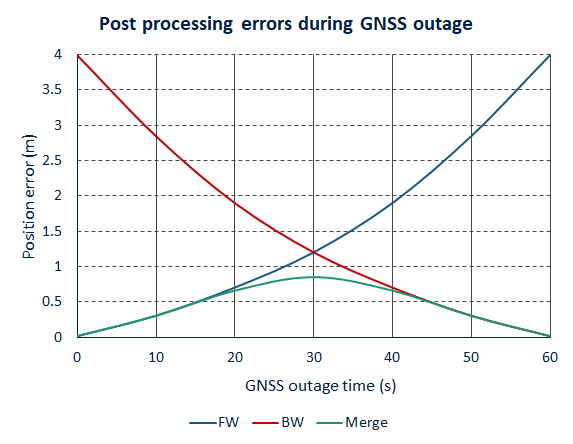
Indeed, during a GNSS outage, it perfectly makes sense to have a large separation at the beginning and at the end of the outage. In the forward direction, when the GNSS outage starts, the INS solution is still very accurate and the accuracy will decrease over time until the outage is over. In the backward direction, it's exactly the opposite and the INS solution will have a poor accuracy when the GNSS outage starts but a good one at the end of the outage. The merged solution however will be even better than both the forward and backward.
 To sum up, when you have large separations, you should always also check the solution standard deviation and make sure everything is consistent. If so, the solution is reliable and the system behave as expected.
To sum up, when you have large separations, you should always also check the solution standard deviation and make sure everything is consistent. If so, the solution is reliable and the system behave as expected.
Qinertia offers a lot of displays and data to check and validate the accuracy and quality. You can, for example, plot the gyroscopes or accelerometers bias so please have a look at all available time series and feel free to contact SBG Systems support@sbg-systems.com team to get more information.