Download PDF
Download page Land applications.
Land applications
Doc for Ellipse firmware ≥ 3.0
You are currently viewing the documentation for an Ellipse running firmware version ≥ 3.0. If your Ellipse is operating on firmware version 2.x or earlier, please use the version picker in the top-right corner of the page to select the appropriate version.
This operating handbook explains how to install and setup an Ellipse in automotive applications such as car, truck, or train. Mechanical installation is explained as well as software configuration. Magnetometers usage is not recommended.
Mechanical installation
Land applications assume a 2D motion with (depending on the motion profile) limited to no lateral velocity. The INS sensor can be located anywhere in the vehicle, considering the following recommendations:
- Sensor is rigidly fixed to the vehicle frame
- Sensor is not moving in regard to other equipment (antennas, LIDAR, etc...)
- Sensor is far from vibrations sources.
Note
SBG Systems IMU are designed to handle vibrations without specific care. Nevertheless in case of highly vibrating environment, a mechanical vibration isolation might be required for proper operation. Silicon or wire dampers can be used for that purpose.
Vehicle Reference Frame
The vehicle coordinate frame is defined as follows:
- X axis points to the front of the car
- Y axis points rightward
- Z axis points downward.
Note
The sensor can be placed in any orientation in the vehicle. When IMU axes do not match exactly with the vehicle coordinate frame, the rough and fine alignment parameters should be corrected through the configuration interface to realign the IMU and vehicle coordinate frames.

Primary lever arm
Once the sensor is installed in the vehicle, the center of Rotation of the vehicle should be identified. This is most often located along the rear axle, at the ground level.
The Primary Lever Arm which is the signed distance in the vehicle frame, FROM the IMU, TO the Center of Rotation should be measured within a 5 cm accuracy.

GNSS setup considerations
When installing your INS with a GNSS aiding, you will need to install the GNSS antennas with a clear view of sky (usually on the roof of the vehicle), and fixed with respect to the IMU.
The GNSS lever arms shall also be measured, which are the signed distance, expressed in the vehicle coordinate frame, FROM the sensor center of measurements, TO the GNSS antenna.
We usually require these measurements to be precisely performed, within 1 cm accuracy.
Note
It's generally not practical to measure with such precision the lever arms, so SBG Systems developed lever arm calibration that enables you to measure rough lever arm estimation (10cm precision) and let the tool refine those measurements.
Single antenna installation
Single antenna installation is possible on all automotive applications with the only limitation that the heading will not be observed while stationary.
A single antenna installation with GNSS lever arm is shown below:

Dual GNSS antenna placement
Dual antenna may be required if dynamics are expected to be low during extended periods of time. When using the INS in a dual antenna setup, the heading will remain stable and precise in all conditions. Heading can also be initialized in static conditions.
Dual antenna systems installation will require special care in order to obtain optimal performance:
- The antennas must be fixed with respect to the to the inertial unit
- Same antenna type should be used
- Same cables with identical lengths must be used for both antennas. If splitters are used make sure that they are adapted and with the same characteristics
- If antennas are not permanently installed on the vehicle roof, antennas reference marks (usually the connector position) should be mounted in a repeatable fashion in order to guarantee antennas phase center stability from mount to mount and minimize changes to heading misalignment angle.
- Both antennas must have the same view of sky: typically place the antennas on the roof of the vehicle.
- Baseline of at least 1 meter between both antennas is recommended for best performance
- If the antenna model does not have integrated ground plane and is not placed on a metal roof, a 10 cm diameter ground plane must be added for both antennas.
Both GNSS antennas lever arms should be measured accordingly.

Software configuration
All Ellipse configuration is done through REST API or sbgCenter software. The General configuration handbook details the general configuration of your INS, and especially lever arms configuration. Make sure to check it first for overall details.
We will detail below the specific use cases that are related to the use of and INS for land applications.
Sensor motion profile
Different motion profiles are available for land applications, each designed to meet specific needs. Choosing the right profile is crucial to fully leverage the performance of the Ellipse. To make the best selection, refer to the detailed descriptions provided for each motion profile in sbgCenter.
Fine misalignment calculation for cars and trucks
Once you have configured the axis misalignment with regard to the vehicle, it can be challenging to calculate precisely the residual misalignment to be entered in your configuration, especially the roll and pitch.
However, in the case of a car or a truck, an easy way to measure roll and pitch misalignment is to park the vehicle and read roll and pitch angles. Then park the vehicle again at the same location but reverse direction, and read again the roll and pitch angles. By averaging the two measurements, you will remove any effect of the road inclination and calculate accurately the residual misalignment between the IMU and the vehicle.
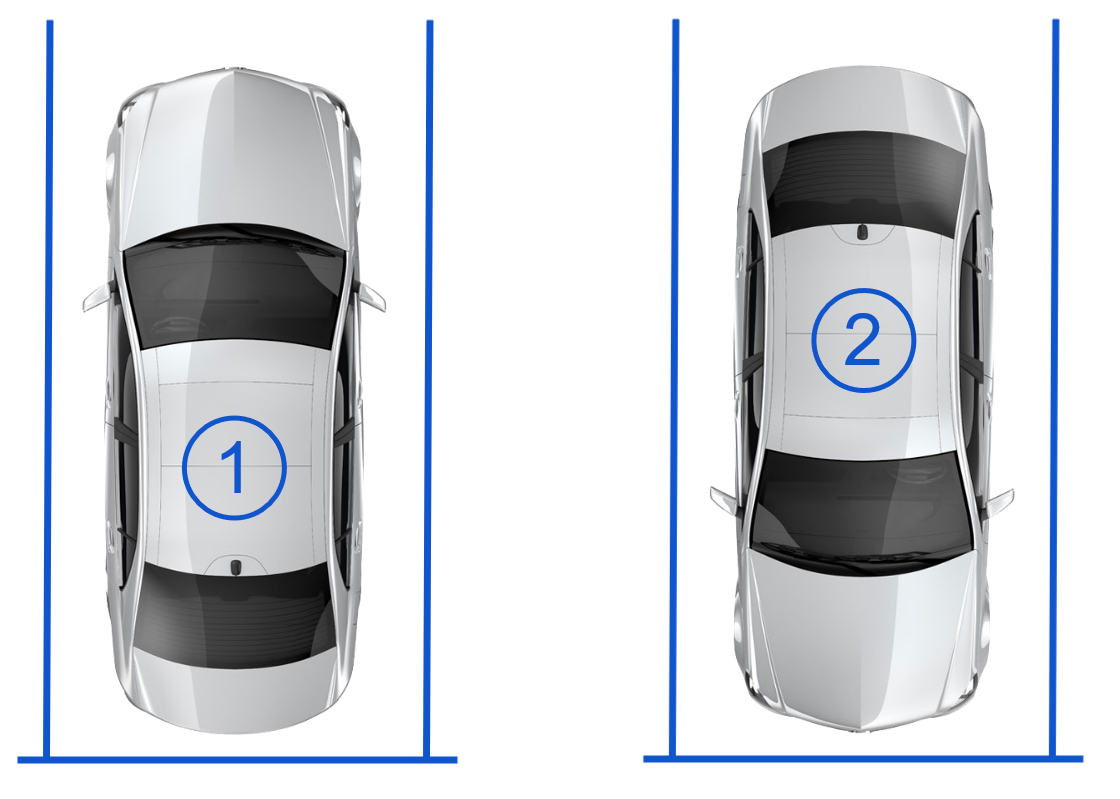
The alignment precision in the vehicle should be less than 1°.
Aiding configuration
After configuring the alignment and the lever arms of the INS, you should configure the aiding you will use:
- If you want to enable GNSS aiding, the internal GNSS configuration and external GNSS integration page details how to enable and configure a GNSS receiver, both internal or external.
- If you want to enable Odometer aiding (which will significantly improve precision in challenging environments or during loss of the GNSS signal), the Odometer integration page details how to install and configure an odometer to be used with your INS.
- The use of the magnetometer in an automotive application is not recommended due to the amount of interference sources on the roads.
Operation
At power up, the unit is able to provide roll and pitch angles. Full navigation data becomes available once GNSS has a correct fix, and the system could initialize the heading angle.
Depending on your GNSS setup, the heading alignment methods changes:
- Dual antenna: For a dual GNSS antenna setup, the heading can be initialized while the vehicle is static. However, the INS needs be started with a clear view of sky to prevent bad initialization of the GNSS true heading
- Single antenna: For a single GNSS antenna setup, the INS will be able to reach full navigation state once the vehicle is traveling at more than 10 km/h. Please, make sure to move only in the forward direction during the initialization unless you are using an odometer with direction information..
Warm-up (Alignment flag)
Warning
Make sure the heading is initialized (as described above), before you start the warm up phase.
For all applications, time to reach optimal performance depends on dynamics and accuracy of alignment and lever arms, but generally around 5 minutes. The system is operational before that time, but performance will not be optimal. The standard deviations can be checked for an estimation of the accuracy to be expected.
Ideally, the beginning of a mission should include some motion patterns with GNSS availability to estimate the internal sensors biases and scale factors. This is the alignment phase.
There is no mandatory pattern to perform, the sensor will only need as much dynamics as possible (orientations and accelerations). Long straight lines should be avoided. A few “eight” figures are sufficient. A typical alignment pattern is shown in the next picture:

You can check in the status check panel what is the current status of the navigation solution with a few simple indicators.
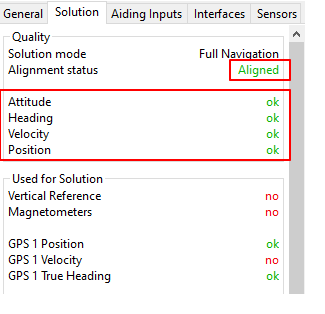
If the alignment status indicates "Aligned" it means the alignment phase is completed and you will be able to benefit of the maximum accuracy of the solution.
Usage without warm-up phase
If, for your use case, you cannot perform a warm-up phase, the INS remains usable but with a lower accuracy during GNSS outage.
The quality statuses (Attitude, Heading, Velocity, and Position) are fully customizable, allowing you to tailor them to your specific application. Use these indicators as a pre-survey check—once they turn green, you're ready to begin.
You are now ready to start your mission!
Miscellaneous
CAN Automotive outputs
It is possible to output a CAN message with specific Automotive information: course angle/direction of travel, vehicle slip angle, and curvature radius.
You can find more information on this output in the Firmware Manual.