Download PDF
Download page 4.0.168-stable.
4.0.168-stable
SBG Systems is proud to announce the release of the latest High Performance INS firmware 4.0.
This major release, since the introduction of Navsight and Quanta products, brings many new features and improvements for end users, surveyors and OEM integrator.
SBG Systems has worked very hard to take into account most of our users requests and offer the best INS available on the market.
You can download and install this new firmware release for free using the link below:
Specific upgrade from 3.0 and older firmwares
If you upgrading from a firmware older than 3.0, you have to first download and install the failsafe firmware before you can install this firmware package.
Please refer to the dedicated failsafe Update Procedure for a step by step guide.
Important Highlights
Heading / Single Antenna
The 4.0 firmware includes the latest SBG Systems Inertial Navigation algorithms. The main focus is related to heading and single antenna INS operations.
The heading mathematical model has been completely reworked to better fit the real world. As a result, the INS initialization using single antenna is more robust and reliable than before.
The heading accuracy and stability has been greatly improved and especially during long straights lines. This also improves a lot the reported estimated heading standard deviation with a value very close actual error.
Finally, all these improvements also speed up initial INS alignment and primary/secondary lever arm estimation runs.
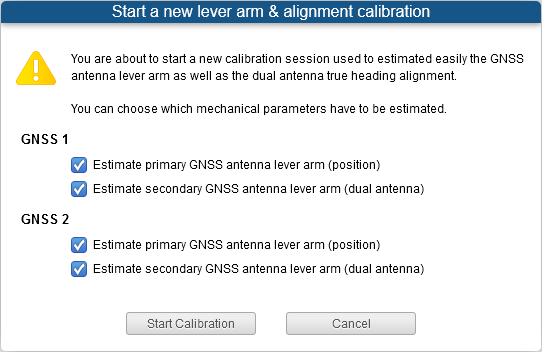
Improved Auto Lever Arm Calibration
SBG Systems INS already had the best algorithm and tool to automatically estimate primary and secondary GNSS antennas lever arms.
The 4.0 firmware further improve this unique tool and you can now select which mechanical parameter you would like to estimate.
It can be very helpful if you have surveyed precisely the primary lever arm using a total station but still would like to evaluate the secondary GNSS antenna lever arm.
You can also estimate only the lever arm for the secondary GNSS receiver without modifying the GNSS 1 existing configuration.
REST API
The firmware 4.0 introduces a brand new REST API to configure and control programmatically all High Performance INS products. All settings and features are supported by this REST API and you can, for example, start/stop the datalogger using the API.
You can find the full API documentation below:
https://support.sbg-systems.com/sc/dev/latest/configuration-api-sbginsrestapi
The REST API is obviously supported over Ethernet but also over Serial interfaces using two new dedicated sbgECom commands.
SBG Systems also provides a CLI tool so you can write simple bash scripts to configure the product over serial. The command below, for example, change the COM A baudrate to 921600 bps:
sbgEComApi.exe -s COM12 -r 921600 /api/v1/settings/ports/comA/baudrate -p -b 921600PTP/NTP
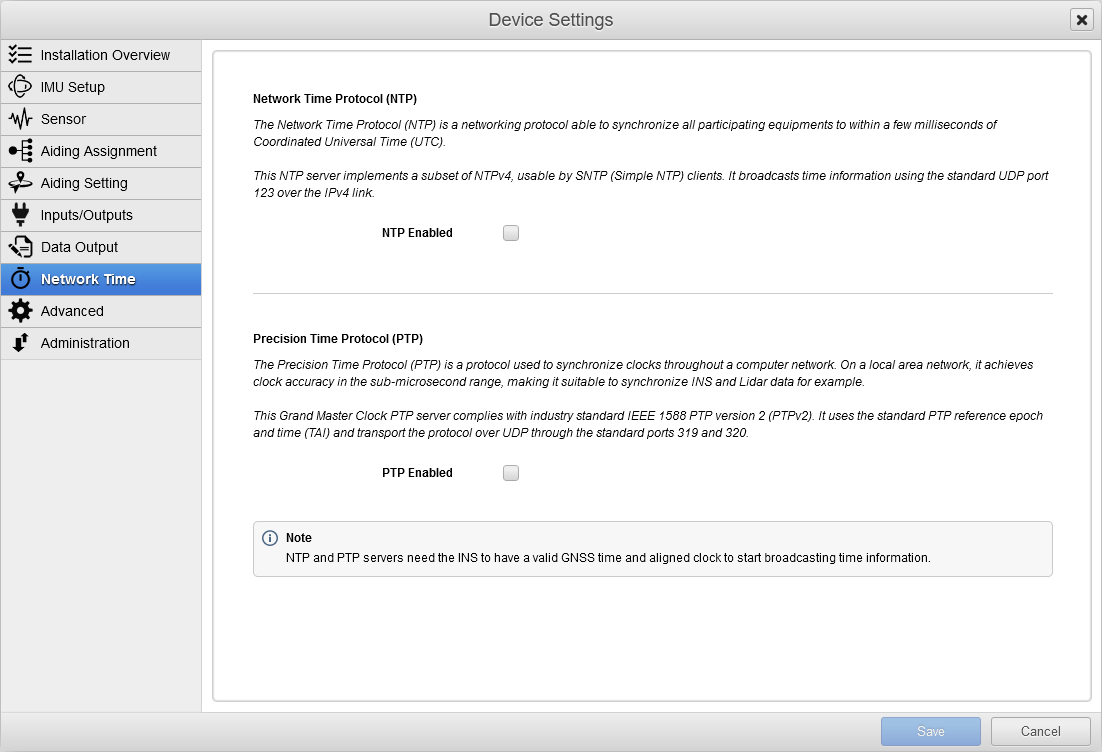
This firmware upgrade turns all SBG Systems high performance INS into a powerful PTP (Precise Time Protocol) Grand Master Clock server.
PTP is the future of time synchronization between equipment in survey and autonomous applications.
It is and more used to keep several cameras and LiDAR equipment synchronized on GNSS / UTC time.
It replaces old fashioned NMEA and PPS signal (Pulse Per Second) as a simple Ethernet cable is required to get a very accurate timing (<1µs).
If you enable the PTP server our your device, a soon as a valid GNSS signal is received, a very precise time information is broadcasted over the network.
All compatible equipment can then time stamp and synchronize data to an absolute GNSS/UTC time.
In addition to PTP, this new firmware also features a Network Time Protocol (NTP) server. A NTP server usually broadcast a time information to within tens of milliseconds. It is however much simpler than PTP and can be enough if you don't need survey grade timing.
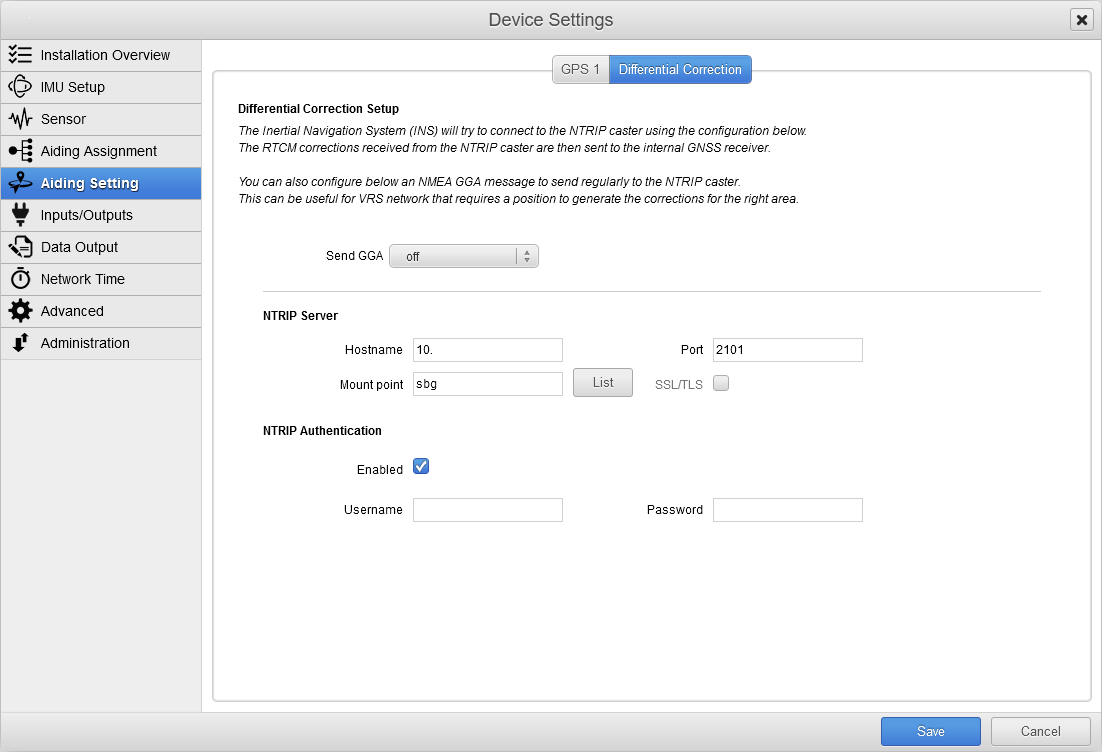
NTRIP
The firmware 4.0 offers a built in NTRIP client that ease integration, configuration and compatibility especially with NRTK (Network Real Time Kinematic) / VRS (Virtual Reference Station) providers.
This NTRIP client is really interesting for Ekinox/Apogee, as now, you only need a standard internet/cellular connection and not anymore a GSM+NTRIP client hardware.
For Navsight and Quanta products, it also simply system setup and you don't have to access the internal GNSS receiver web interface and configuration.
Finally, the NTRIP client can be controlled programmatically using the REST API so integrator can benefit from a professional NTRIP client very easily.
RTCM Raw stream
A new message log has been added to log input RTCM stream in the internal datalogger. The input RTCM stream can come from a NTRIP client or from a serial/Ethernet interface.
This RTCM stream can be used to post process the GNSS/INS trajectory in Qinertia and benefit from performance and robustness improvement thanks to Qinertia tightly coupled forward/backward merged solution.
If you are using a real time NRTK VRS (Virtual Reference Station) during the acquisition, it can be interesting to use this feature and easily deliver your project in the right datum.
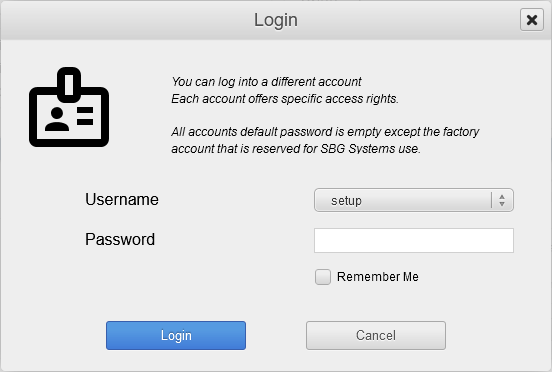
Access Rights
A new access right management system has been designed to fulfill surveyors needs as well as OEM integrator requirements.
For large survey companies, it is interesting to protect the INS configuration but still allow an operator to enable/disable the data logger and review the INS status.
Three roles have been defined and you can define a password for each one of them to limit rights:
| Role Name | Description |
|---|---|
| Viewer | The user can only consult INS measurements and status. |
| Operator | In addition to viewer rights, an operator can enable/disable the data logger to do survey job acquisitions. |
| Setup | The setup user can access and change all parameters as well as start/stop lever arm auto calibration runs. |
Access rights are completely integrated in the web interface as well as in the REST API. An OEM integrator can, for example, protect the INS configuration from unwanted modifications from the web page or from the serial interface.
Port D/E
Quanta and Navsight units are now able to output any type of message on Port D and Port E in addition to Port A/B/C. With this upgrade, Navsight products now features up to 5 full duplex RS-232/RS-422 serial ports with no limitations or constraints.
This enables complex integrations where a lot of serial outputs are required. It has been requested especially for large bathymetry vessels where a lot of equipment have to be driven by the INS.
Release 4.0.168-stable
Improvements
- [EKIFW-2014] - Improved PULSE40 / EKINOX IMU OEM label and description
Bug Fixes
- [EKIFW-2011] - [Trimble] - Fix RAW GNSS data that are not correctly logged
- [EKIFW-2013] - Fix SBG UART IMU device information report in system logs
Release 4.0.152-stable
New Features
- [EKIFW-1930] - Add APOGEE-I OEM version IMU model
- [EKIFW-1869] - Add GNSS position display in the web interface directly
- [EKIFW-1992] - Add NMEA message GPROT
- [EKIFW-1990] - Add RTCM raw data message for support and post processing preset
- [EKIFW-1812] - Add a built PTP grand master server able to broadcast time better than 1us
- [EKIFW-1811] - Add a built in NTP time server that can broadcast absolute UTC time
- [EKIFW-1572] - Add a built in NTRIP client to feed internal GNSS receiver with corrections data
- [EKIFW-1618] - Add a new user authentication system to prevent unauthorized settings modifications
- [EKIFW-1885] - Add an option for each interface to output either standard (81 chars) NMEA messages or extended
- [EKIFW-1886] - Add an option to always output time even if invalid in NMEA messages
- [EKIFW-1525] - Add factory specific settings for OEM integrators
- [EKIFW-1986] - Add output log generation on Port D/E for Navsight/Quanta units
- [EKIFW-1591] - Add position standard deviation to ShipMotionData
- [EKIFW-1784] - Add support for EKINOX v2 IMU model OEM version (PULSE40)
- [EKIFW-1314] - Add support for Meas3 raw GNSS data for Septentrio based products
- [EKIFW-1803] - Add support to new EKINOX-I hardware revision 2
- [EKIFW-1564] - Add support to output NMEA PPS frames
- [EKIFW-1563] - Added KMB binary sensor output log
- [EKIFW-1570] - Added for NAVSIGHT & Quanta output for Port D and Port E
- [EKIFW-1936] - Added support for NAVSIGHT OEM starter kit
- [EKIFW-1576] - Now RTCM data can be sent to the INS using any serial or Ethernet interface and not only Port D
- [EKIFW-1887] - [WEB] - Implement new NMEA output options
- [EKIFW-1845] - [WEB] - Update firmware upload with a progress indication
Improvements
- [EKIFW-1935] - Actively probe for Septentrio receivers to speed up boot
- [EKIFW-1951] - Add an elevation mask of 10° on tracked SV for Septentrio GNSS receivers
- [EKIFW-1899] - Add support for Septentrio AsteRx-m3 pro+
- [EKIFW-1805] - Allow SYNC IN B/C/D/E as adaptive timer sources
- [EKIFW-1938] - Check and inform the user if the firmware package is too big to be installed on the product
- [EKIFW-2007] - Embed latest PULSE40 stable firmware
- [EKIFW-1893] - Improve Septentrio enabled signals and used in the PVT solution
- [EKIFW-1891] - Improve the boot procedure used with Septentrio GNSS receivers
- [EKIFW-1997] - Improved heading accuracy and stability especially in low dynamics conditions
- [EKIFW-1944] - Improved navigation filter heading initialization in single antenna mode
- [EKIFW-1943] - Improved single antenna heading accuracy and stability during long straight lines
- [EKIFW-1998] - Improved single antenna heading initialization and navigation accuracy
- [EKIFW-1941] - Improved vertical gyro reliability and stability during long operations
- [EKIFW-1978] - Increase lever arm limit from 100 meters to 1000 meters
- [EKIFW-1696] - Now, the navigation filter is restarted automatically if settings are changed without requiring a device reboot
- [EKIFW-1989] - Update Septentrio AsteRx-4-Fg firmware to version 4.10.3
- [EKIFW-1871] - Updated APOGEE-D & NAVSIGHT-S GNSS firmware to version 4.10.0
- [EKIFW-1872] - Updated QUANTA GNSS firmware to version 4.8.2
- [EKIFW-2010] - Updated ZDA message generation to output empty fields for time zone offset
- [EKIFW-1875] - Updated documentations link to redirect to the new support center
- [EKIFW-2006] - Updated failsafe firmware to comply with new upgrade method
- [EKIFW-1800] - [EKF Auto Cal] - It's now impossible to start an auto calibration if the INS clock is not aligned
- [EKIFW-1644] - [WEB] - Improve output log preset management
- [EKIFW-1777] - [WEB] - Improved 3D view frame arrow scale
- [EKIFW-1616] - [WEB] - User can now only estimate specific parameters in the auto calibration module
Bug Fixes
- [EKIFW-1815] - Fix NMEA GGA differential age field to comply with standard
- [EKIFW-1898] - Fix NMEA differential corrections age and base station ID when invalid
- [EKIFW-1565] - Fix TCP client interface error handling
- [EKIFW-1847] - Fix clock that is stuck to steering mode following a ekf auto cal start
- [EKIFW-1991] - Fix odometer sending too much ZUPT when stationary
- [EKIFW-1714] - Fixed VTG Magnetic course over ground
- [EKIFW-1862] - Improved Terrastar support for Novatel GNSS receivers
- [EKIFW-1722] - [WEB] - Fix drag and drop causing crash
- [EKIFW-1737] - [WEB] - Fix interface crash when dragging mouse out of view