Download PDF
Download page External NMEA GNSS integration.
External NMEA GNSS integration
This brief document guides you in the process of connecting an external NMEA GNSS receiver to your High Performance SBG INS products.
Use this document in complement of the “Operations” Operating Handbooks.
Step 1 : GNSS and sensor connections
Two physical communication layers can be used for feeding the NMEA frames to the INS : serial communications (recommended) or Ethernet (not in the scope of that document).
In both case, connect GNSS PPS signal to an available Sync Input.
In case of serial communications, connect GNSS Tx signal(s) to one of the available serial ports Rx pin.
Step 2 : GNSS module configuration
Basic operation
Configure the following outputs and output rates on your GNSS receiver:
RMC @ 5 Hz
GGA @ 5Hz
GST @ 5Hz
HDT @ 5Hz (if applicable, on dual antenna systems)
ZDA @ 1Hz
PPS signal
For proper operation, a PPS signal must be provided at 1 Hz.
Specific configuration of Hemisphere receivers
It is important to disable any smoothing or gyro aiding in a GNSS receiver, and to send the raw GNSS solution to the INS.
The following commands can be used to disable all smoothing or aiding in an Hemisphere GNSS receiver:
| Command | Description |
|---|---|
| $JATT,COGTAU,0<CR><LF> | Set the course over ground (COG) time constant to 0 |
| $JATT,GYROAID,NO<CR><LF> | Turn off gyro aiding |
| $JATT,HBIAS,0<CR><LF> | Set the heading bias to 0 |
| $JATT,HRTAU,0<CR><LF> | Set the rate of turn time constant to 0 |
| $JATT,HTAU,0<CR><LF> | Set the heading time constant to 0 |
| $JATT,PBIAS,0<CR><LF> | Set the pitch bias to 0 |
| $JATT,PTAU,0<CR><LF> | Set the pitch time constant to 0 |
| $JATT,SPDTAU,0<CR><LF> | Set the speed time constant to 0 |
| $JATT,TILTAID,OFF<CR><LF> | Disable the tilt aiding |
| $JTAU,COG,0<CR><LF> | Set the course over ground time (COG) constant to 0 |
| $JTAU,SPEED,0<CR><LF> | Set the speed time constant to 0 |
Step 3 : INS configuration
In order to configure the INS, you need to connect to the Web interface and open the configuration window. Simply follow those instructions:
Set aiding assignment
In this window, you just indicate on which port you connected your GNSS receiver and PPS.
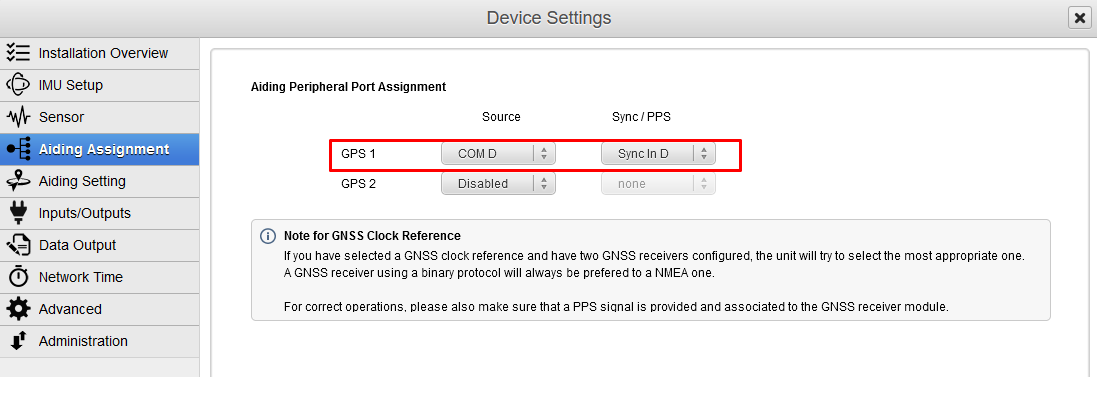
Both communication port and Sync In pin must be set.
If you have two connected GNSS receivers, only the primary GNSS receiver should provide a PPS source to accurately time stamp the data.
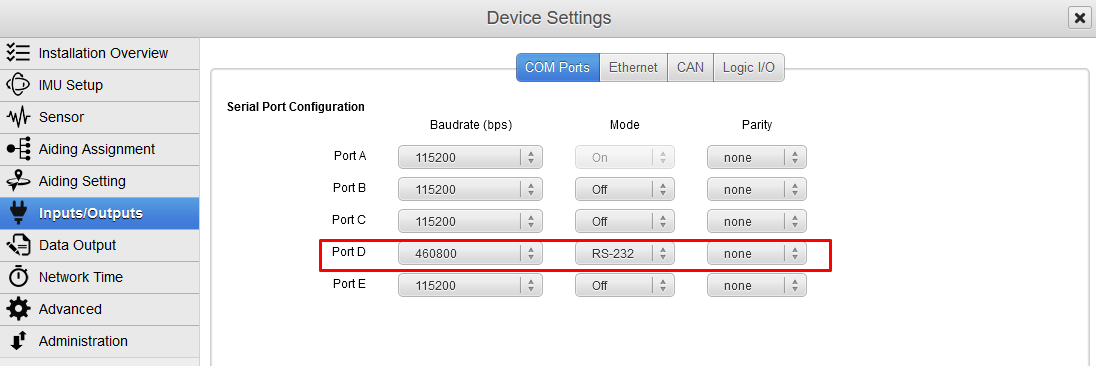
Set correct baudrate and mode for serial port
In our example we configured the GNSS to be connected on PORT D in RS‑232 mode using a baudrate of 460800 bauds.
Set logic input configuration for PPS signal
In order to use correctly PPS signal information, you must enable the corresponding logic input. Here we configured PPS on Sync In D.
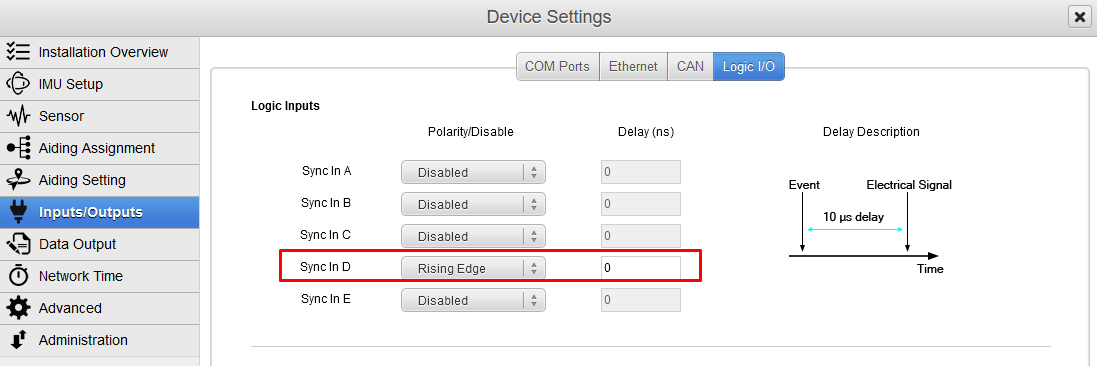
Polarity should be set accordingly with the actual PPS signal which is provided by your GNSS receiver.
Set correct GNSS model and configuration
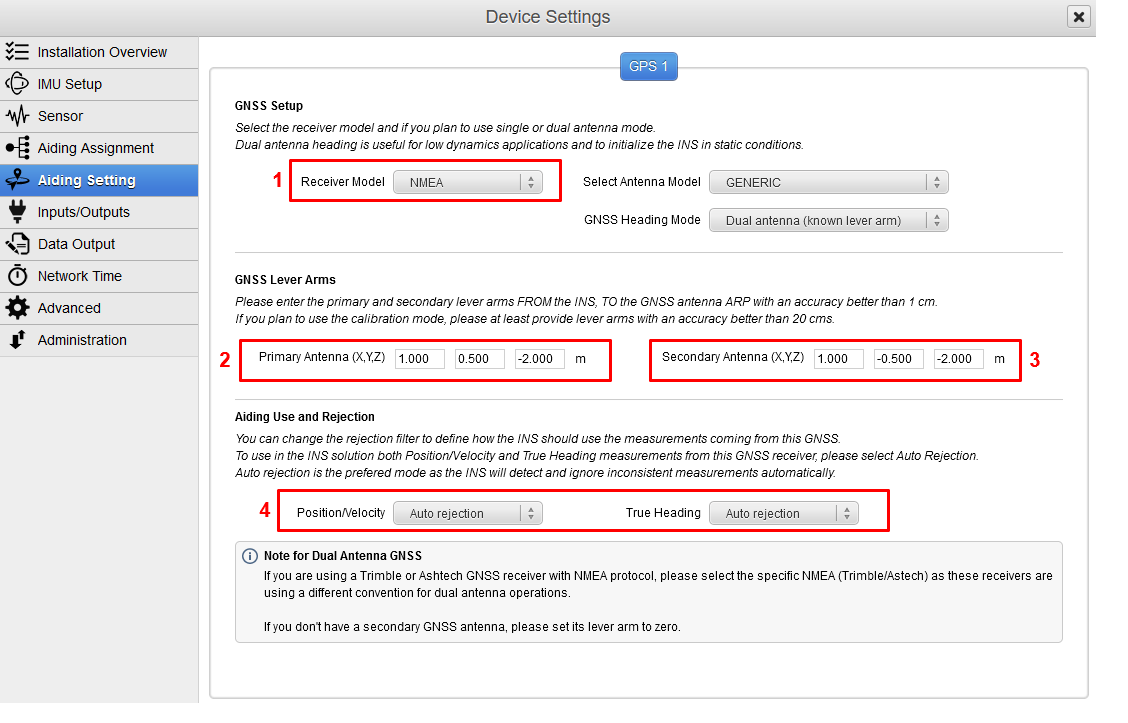
GNSS model should be set to NMEA.
GNSS Primary lever arm has to be entered within a 1 cm accuracy FROM the IMU reference point, TO the antenna reference point (ARP), in the vehicle frame.
In Dual Antenna (known lever arm) mode, offset for the secondary antenna (providing heading) must also be entered, FROM the IMU reference point, TO each antenna reference point. It is also possible to select Dual Antenna (auto lever arm) if a calibration is planned for the antennas lever arms.
Finally, each available measurement (position/velocity and true heading if available) should be configured to be used or not. Auto rejection mode is recommended.
In order to increase the precision of the measurements it is recommended to select the actual Antenna model from the droplist. If you don't know what model to choose, you can select "Generic". In that case, the measured lever arms should refer to your antenna phase center (APC).
When using an external GNSS receiver, it is highly recommended to have the same antenna model selected on the GNSS receiver and the INS settings.
If you are using the NMEA model with a receiver Trimble or Ashtech, select the GNSS model NMEA Trimble/Ashtech as the heading is referenced the other way around with those GNSS receivers.
If you cannot measure the lever arms to 1 cm accuracy, a calibration can be performed. See Lever Arms Calibration Procedure.
Step 4 : Checking status
Once fully configured, the global status must be checked :
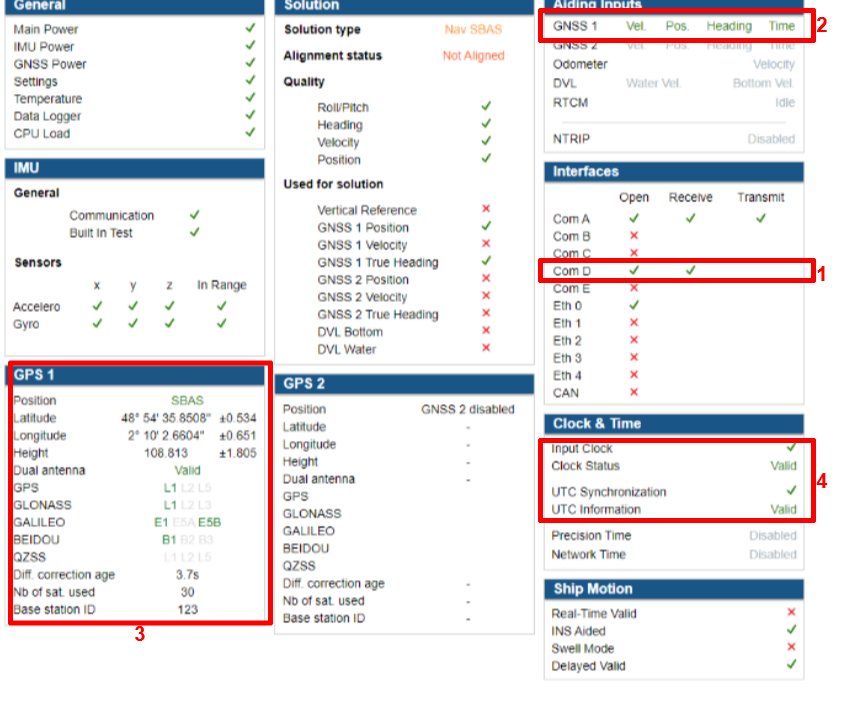
- Corresponding COM port must be opened and Rx flag OK. Baudrate should be the same in the GNSS and the SBG unit configuration.
- GNSS 1 or 2 line in “Aiding Inputs” section must show valid data.
- GNSS solution is reported in that section. Check if there is a good GNSS fix here.
- Then you can check at the Clock section. Input clock must be OK and UTC time should be set to valid after a few minutes in alignment mode.