Download PDF
Download page Airborne applications.
Airborne applications
Doc for Ellipse firmware ≥ 3.0
You are currently viewing the documentation for an Ellipse running firmware version ≥ 3.0. If your Ellipse is operating on firmware version 2.x or earlier, please use the version picker in the top-right corner of the page to select the appropriate version.
This operating handbook explains how to install and setup an Ellipse in airborne applications such as aircraft, helicopter, or UAV. Mechanical installation is explained as well as software configuration and magnetic calibration.
Mechanical installation
Airborne applications assume a 3D motion. The INS sensor can be located anywhere in the aircraft, considering the following recommendations:
- Sensor is rigidly fixed to the aircraft frame : avoid locations that may be bending like wings
- Sensor is not moving in regard to other equipment (antennas, LIDAR, etc...)
- Sensor is far from strong vibrations sources : avoid placing the sensor directly on the engine mounts.
- Sensor should be protected from high temperature variations.
- When relevant (if magnetometers are used), place the sensor away from magnetic disturbances like strobe lights, high current equipment, radios or moving parts like landing gears.
Note
SBG Systems IMU are designed to handle vibrations without specific care. Nevertheless in case of highly vibrating environment, a mechanical vibration isolation might be required for proper operation. Silicon or wire dampers can be used for that purpose.
Aircraft reference frame
The vehicle coordinate frame is defined as follows :
- X axis points to the front of the aircraft
- Y axis points rightward.
- Z axis points downward.
Note
The sensor can be placed in any orientation in the aircraft. When IMU axes do not match exactly with the aircraft coordinate frame, the rough and fine alignment parameters should be corrected through the configuration interface to realign the IMU and aircraft coordinate frames.

GNSS setup considerations
When installing your INS with a GNSS aiding, you will need to install the GNSS antennas with a clear view of sky, and fixed with respect to the IMU.
The GNSS lever arms shall also be measured, which are the signed distance, expressed in the aircraft coordinate frame, FROM the sensor center of measurements, TO the GNSS antenna.
We usually require these measurements to be precisely performed, within 1cm accuracy.
Note
It's generally not practical to measure with such precision the lever arms, so SBG Systems developed lever arm calibration that enables you to measure rough lever arm estimation (10cm precision) and let the tool refine those measurements.
The GNSS lever arms should be lower than 10m to minimize induced errors.
Single antenna installation
Single antenna installation is possible when regular dynamics are experienced and allow to converge heading angle. Typical heading performance will degrade during straight lines and will re-converge during dynamic phases.
A single antenna installation with GNSS lever arm is shown below:

Dual antenna installation
Dual antenna may be required if dynamics are expected to be low during extended periods of time (eg. navigation with more than 5min of straight lines). When using the INS in a dual antenna setup, the heading will remain stable and precise in all conditions. Heading can also be initialized in static conditions.
Dual antenna systems installation will require special care in order to obtain optimal performance :
- The antennas must be fixed with respect to the to the inertial unit
- Same antenna type should be used
- Same cables with identical lengths must be used for both antennas. If Splitter are used make sure that they are adapted and with the same characteristics
- Both antennas must have the same view of sky. Typically avoid placing antennas on each side of the rudder or parts that could mask a significant part of the sky.
- If the antenna model does not have integrated ground plane, a 10 cm diameter ground plane must be added for both antennas.
- If antennas are not permanently installed on the aircraft, antennas reference marks (usually the connector position) should be mounted in a repeatable fashion in order to guarantee antennas phase center stability from mount to mount and minimize changes to heading misalignment angle.
Both GNSS antennas lever arms should be measured accordingly.

Software configuration
All the configuration is done through the web interface. The General configuration handbook details how to configure your INS, and especially the lever arms configuration. Make sure to check it first.
We will see below the specific use cases that are related to the use of your INS for Airborne applications.
Motion profile selection
Several airborne motion profiles are available to tune the Kalman filter settings specifically for your application:
- Airplane: for any fixed wing mission with only forward movement
- UAV: for short missions that have lateral movements, with low speed but high dynamics
- Helicopter: for other airborne missions that have lateral movement
Aiding configuration
After configuring the alignment and the lever arms of the INS, you should configure the aiding you will use:
- If you want to enable GNSS aiding, the internal GNSS configuration and external GNSS integration page details how to enable and configure a GNSS receiver, both internal or external.
- If you want to use the Magnetometer for heading, the Magnetic calibration for airborne applications page details how to perform the mandatory calibration process on airborne applications.
Airdata input
If you want to use an Airdata aiding, please contact our support team
Operation and heading considerations
At power up, the unit is able to provide roll and pitch angles. Full navigation data becomes available once GNSS has a correct fix, and the system could initialize the heading angle.
Dual antenna systems
In case of a dual antenna GNSS setup, heading initialization can be performed in static. Unit should be started with a clear view of sky to prevent bad initialization of the GNSS true heading.
The system will maintain accurate heading as long as a good GNSS signal is available.
Single antenna systems
The airborne motion profiles can operate in single antenna. The heading is then maintained accurate during dynamic maneuvers, and may drift during low dynamic or straight lines.
After a certain time (which may be higher for higher IMU grades), turns might be required to re-converge heading to optimal performance.
In order to initialize the heading, the different airborne motion profiles will behave slightly differently. Full details on heading alignment methods may be found here.
Airplane motion profile heading initialization
The airplane motion profile uses the traditional kinematic alignment: the heading will initialize when the aircraft is moving at a higher speed than 10km/h.
UAV and Helicopter motion profiles heading initialization
The Helicopter or UAV motion profiles use the free kinematic alignment, where the heading is initialized when horizontal accelerations are observed. Performing some turns, accelerating or braking will allow a proper heading initialization.
Warm-up (Alignment flag)
Make sure the heading is initialized (as described above), before you start the warm up phase.
Once the system is operating in "Full Navigation mode", the warm-up phase can start. In this phase, the sensor fusion algorithm estimates the sensors' biases and scale factors to optimize navigation performance. The system is operational before that time, with consistent quality indicators, but performance may not be optimal under challenging conditions like GNSS outages. Depending on conditions, the alignment phase will usually last between 2 to 10 minutes.
Some parameters will directly impact the alignment phase duration :
- RTK or equivalent GNSS solutions may reduce significantly the time needed to align the solution.
- Dynamic maneuvers involving accelerations and turns are also ideal to speed up the alignment process.
There is no mandatory pattern to perform, the sensor will only need as much dynamics as possible (orientations and accelerations). Long straight lines should be avoided. A few “eight” figures are sufficient most of the time. A typical alignment pattern is shown in the next picture:

You can check in the status check panel what is the current status of the navigation solution with a few simple indicators.
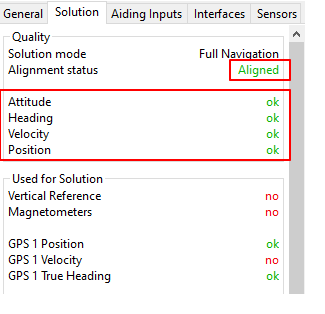
If the alignment status indicates "Aligned" it means the alignment phase is completed and you will be able to benefit of the maximum accuracy of the solution.
Usage without warm-up phase
If, for your use case, you cannot perform a warm-up phase, the INS remains usable but with a lower accuracy during GNSS outage.
The quality statuses (Attitude, Heading, Velocity, and Position) are fully customizable, allowing you to tailor them to your specific application. Use these indicators as a pre-operation check—once they turn green, you're ready to begin.
Once these status flags are green, you can start your mission!