Download PDF
Download page Real time operation with cm level accuracy.
Real time operation with cm level accuracy
This article covers integration aspects required for reaching centimeter level accuracy in real time applications. For general GNSS technology knowledge click on this link: GNSS.
Post-processed applications
Note that some application don't require the navigation solution to be computed in real time. In such case, it might be relevant to investigate how post-processing could simplify your setup. The following article covers the high precision applications in post-processing.
RTK
RTK (Real-Time Kinematic) positioning is a technique used in GNSS navigation to have a more accurate position up to 1cm in real time (1cm + 1ppm). RTK uses two receivers: one base and one rover that are located in the same area (up to 20km typically).
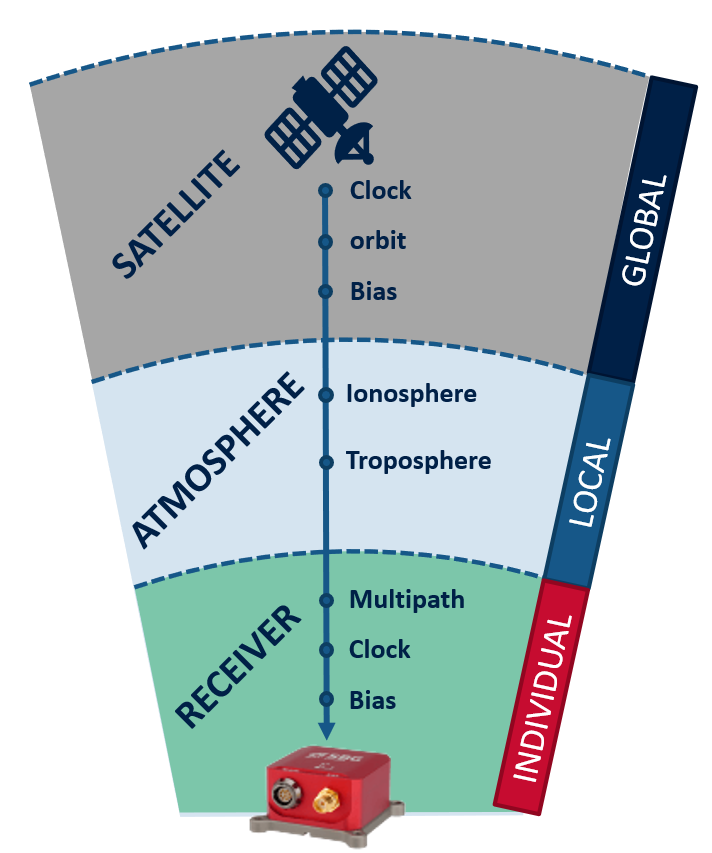
The major advantage of RTK is that is is able to cancel all the common errors involved in the GNSS algorithms. In particular, the atmospheric errors caused by ionosphere and troposphere are cancelled when rover and base are close enough. As the distance between rover and base increase, the residual atmospheric errors becomes more important and will impact the RTK solution (typically an error increase of 1ppm of the distance between base and rover).
This means that with a 20km baseline, the RTK accuracy will be 1cm + 1ppm x 20km = 3cm.
Relative position vs Absolute position
Note that RTK technology provides a relative positioning to the base station to the cm level. In order to obtain a centimeter level absolute accuracy, the base station used must be precisely located to the centimeter level as well.
Typical RTK setup
In order to enable RTK operation, your system will be composed of three major components:
The Rover receiver, located on the vehicle. This is typically the GNSS receiver that is integrated into your navigation system. This receiver must allow RTK computations (permissions).
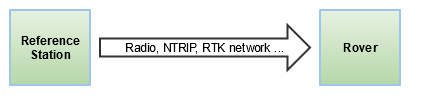
The Base Station (or Reference Station) is a static GNSS receiver on the ground that sends corrections to the Rover via a wireless link. The base station can be installed by the surveyor, it can be part of an already existing network of base stations, or it can even be virtually created thanks to a network of base stations.
A way to communicate between the Rover and Base Station - typically a UHF, or 4G GSM modem.
RTK corrections formats
There are standard different formats that are used for RTK corrections:
- RTCM2.x => Older format from the ages of DGPS, now replaced by RTCM3.x
- RTCM3.x => Most interoperable correction format, supported by all our products
- CMR => Older Trimble proprietary format
- CMR+ => Multi constellation Trimble correction proprietary format
Installing a base station
To install your own RTK base station you will need the following:
A GNSS receiver and antenna that will be used as the base station
A radio system (one for the base and one for the rover) for wireless connection to the Rover
The base station is going to send the RTK corrections wirelessly via the radio to the rover.
If the absolute position accuracy is an important aspect, the base station position must be precisely surveyed using a PPP technique.
Network RTK (NRTK)
A base station network can be used instead of installing your own base station. Some networks are free to use, some require a fee. They can be accessed online via an NTRIP client.
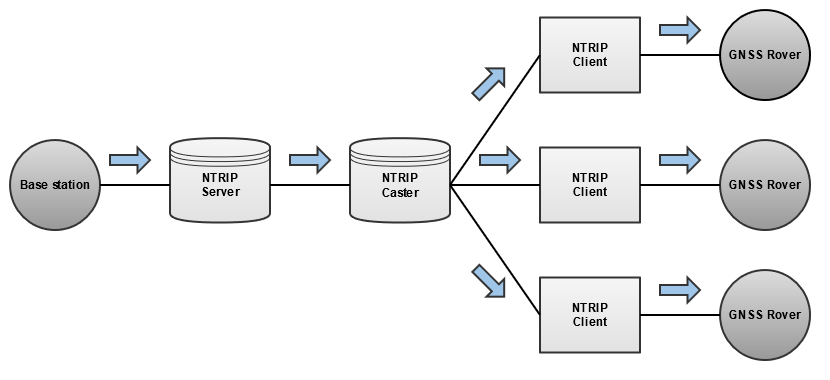
NTRIP
An NTRIP client is used to connect to a server via the Internet. Once connected, it will receive corrections from a base station nearby, or from a virtual base station created using multiple base stations in the surrounding.
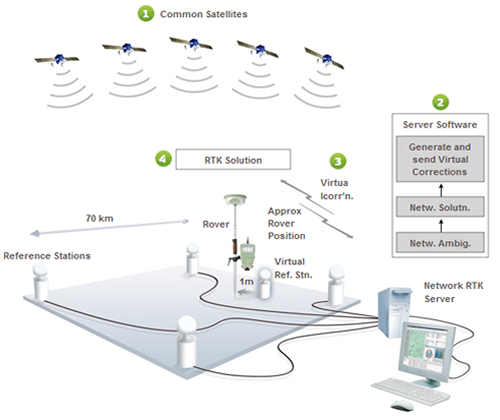
VBS / VRS
A Virtual Base Station or Virtual Reference Station (VRS) is a base station that doesn’t exist physically, but is created virtually using several physical base stations. This is used usually when the closest base stations are too far to be used accurately. A VBS usually requires the position of the Rover in order to be created as close as possible to it for the best accuracy.
PPP
Precise Point Positioning can be used in case no base stations can be used nearby. This is typically used in offshore applications where there is no stable land to install a static base station.
The drawback with using PPP is that the solution takes time to converge (around 20 minutes) so it should not be used in harsh environments.
PPP services include Omnistar, Marinestar, and others.